发表于:2019/4/19 13:21:31
#0楼
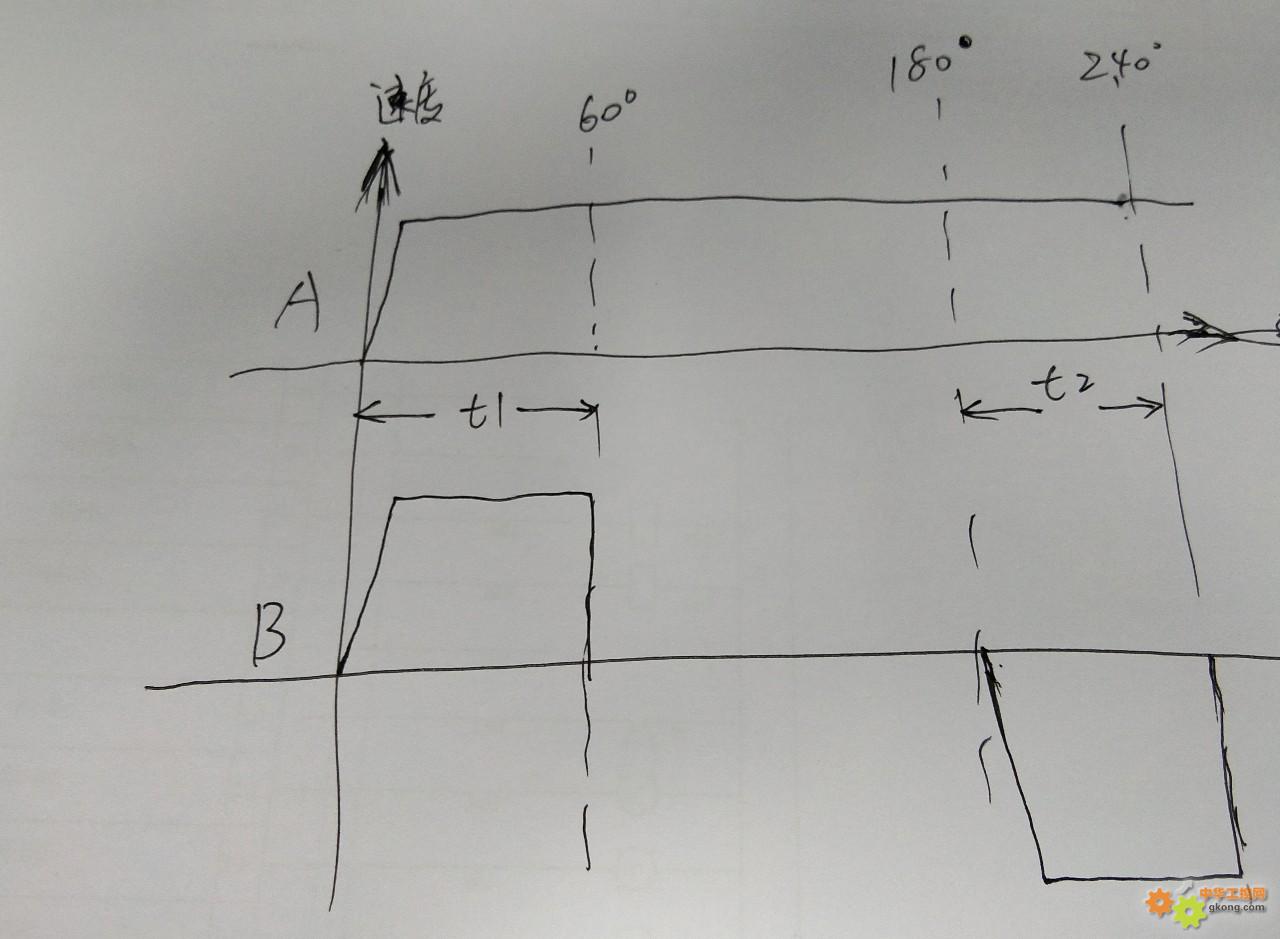
在某应用场合使用伺服电机A及伺服电机B,运用的是电子凸轮
他们相互间的运动关系大概为:A轴为旋转轴始终匀速旋转,当A轴转到0度时B轴启动正转,A轴转到60度时B轴停止,
A轴转到180度时B轴启动反转,A轴转到240度时B轴反转停止,A轴再次转到0度时B轴再次启动正转,如此反复。
现在出现的故障是, 旋转轴A低速的时候,B轴在A轴转到0度的时候启动凸轮后,两轴的位置对准的,旋转轴A速度变快后,
B轴始终位置相差一定的位置,我考虑到程序的扫描周期,伺服的响应频率
针对扫描周期,我把程序已经删的只剩这一功能,然后测试,还是出现这样情况
伺服的响应频率如果设置的微高,机械就产生了震荡,所以微调了下
我用的是三菱FX5U+FX5-40SSC-S的,伺服系统是MR-JE-XXXB,
开启凸轮信号用的是上升沿信号(主轴的每个周期,凸轮都有开启,关闭),总的程序写了大概7400步左右
以上情况希望大家给我支支招,万分感谢
他们相互间的运动关系大概为:A轴为旋转轴始终匀速旋转,当A轴转到0度时B轴启动正转,A轴转到60度时B轴停止,
A轴转到180度时B轴启动反转,A轴转到240度时B轴反转停止,A轴再次转到0度时B轴再次启动正转,如此反复。
现在出现的故障是, 旋转轴A低速的时候,B轴在A轴转到0度的时候启动凸轮后,两轴的位置对准的,旋转轴A速度变快后,
B轴始终位置相差一定的位置,我考虑到程序的扫描周期,伺服的响应频率
针对扫描周期,我把程序已经删的只剩这一功能,然后测试,还是出现这样情况
伺服的响应频率如果设置的微高,机械就产生了震荡,所以微调了下
我用的是三菱FX5U+FX5-40SSC-S的,伺服系统是MR-JE-XXXB,
开启凸轮信号用的是上升沿信号(主轴的每个周期,凸轮都有开启,关闭),总的程序写了大概7400步左右
以上情况希望大家给我支支招,万分感谢
[此贴子已经被jint于2019/4/19 14:57:57编辑过]