发表于:2018/8/27 17:16:28
#0楼
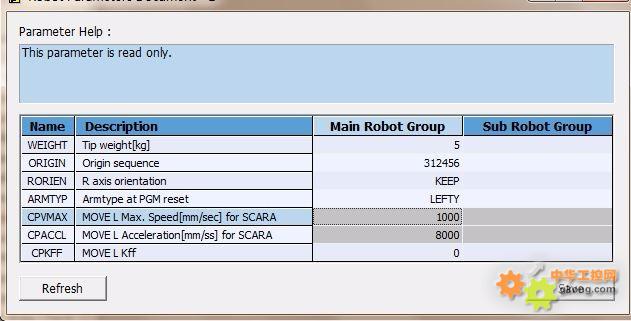
YAMAHA机器人的速度指令我都已经设置为100%,为什么速度还这么慢呢
SPEED 100
ASPEED 100
ACCEL 100
DECEL 100
SPEED 100
ASPEED 100
ACCEL 100
DECEL 100