














发表于:2018/8/19 22:23:33
#0楼
理想光学系统下物像关系分析及应用
在视觉检测装置中,图像采集组要由相机和镜头完成,为得到一张理想的图像,需要合理选择相机及镜头。在工作中相机的选择一般根据所需的图像分辨率即可确定型号。而镜头的选择则需根据工件尺寸(视野)及安装空间(物距)综合选定,有多种组合情况。
在实际工作中,一般会根据实际应用经验,将常用镜头的视野与物距编制成视野表,以便在需要时进行查阅。通过视野表选择镜头会比较准确,但需一一查找,效率较低。为提高效率,可通过镜头成像公式进行计算得到。本文即对此计算公式进行简单说明。
一、理想光学系统
工业镜头结构如图二所示,是由多组镜片组合而成,多镜片组合光路计算比较复杂,而镜头的最终效果是体现为凸透镜的,故为了进行估算,可将其简化为一个凸透镜,采用理想光学系统模型进行分析。

在几何光学中,所谓的理想光学系统,就是对足够大空间内的各个点能以足够宽光束成完善像、理想像的光学系统。在各向同性的均匀介质中,理想光学系统的物像关系应具备以下特性:
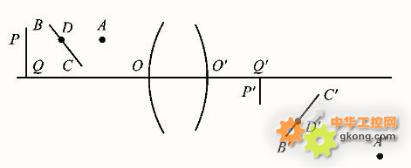
1、点成点像:即对于物空间的每一点,在像空间必有一个点与之相对应,且只有一个点与之对应,这样的两个对应点称为物像空间的共轭点(如图一中的A点和A′点);
2、线成线像:即对于物空间的每一条直线,在像空间必有一条直线与之相对应,且只有一条直线与之对应,这样的两条对应直线称为物像空间的共轭线(如图一中的BC和B′C′);
3、平面成平面像:即物空间的每一个平面,在像空间必有一个平面与之相对应,且只有一个平面与之对应,这样的两个对应平面称为物像空间的共轭面(如图一中的PQ面和P′Q′面)。
二、理想光学系统下物像关系解析
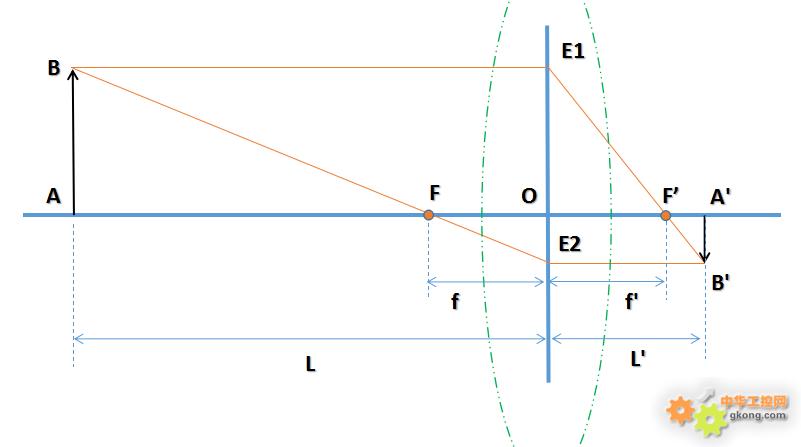
在图三中,E1E2为理想透镜中轴线,AA’为穿过透镜中心的光轴,与E1E2交于O点,F、F’为焦点。
根据理想光学系统物像关系,设透镜外一垂直于光轴AA’的线段端点B发出两条特定光线,一条由点B发出通过焦点F,与透镜中轴交于E2,经透镜折射后的光线平行于光轴;另一条光学由点B发出平行于光轴,与透镜中轴交于E1点,经透镜折射后的光线将通过像方焦点F’。在像空间这两条光线的交点B’即为点B的像点。过点B’作光轴的垂线B’A’,即为物AB的像。
1、物高H、物距L、像高h、与焦距f之间的关系。
对图三光路进行分析可知,三角形ABF与三角形FOE2互为相似三角形,且B’A’=OE2,故A’B’:AB=OF:AF=f:(L-f),即f/(L-f)=h/H。
2、物高H、像距l、像高h、与焦距f之间的关系
对图三光路进行分析可知,三角形E1E2F’与三角形F’A’B互为相似三角形,且AB=E1E2,故A’B’:E1E2=AF:OF’=(L’-f’):f’=h:H,因f=f’,所以f/l=H/(H+h)。
通过以上两组关系式,即可依据其中三个参数,快速估算得到第四个参数的值,在进行镜头选型或视觉系统装配关系时,获得参考。
[此贴子已经被作者于2018/8/19 22:24:19编辑过]