发表于:2018/8/7 8:29:11
#0楼
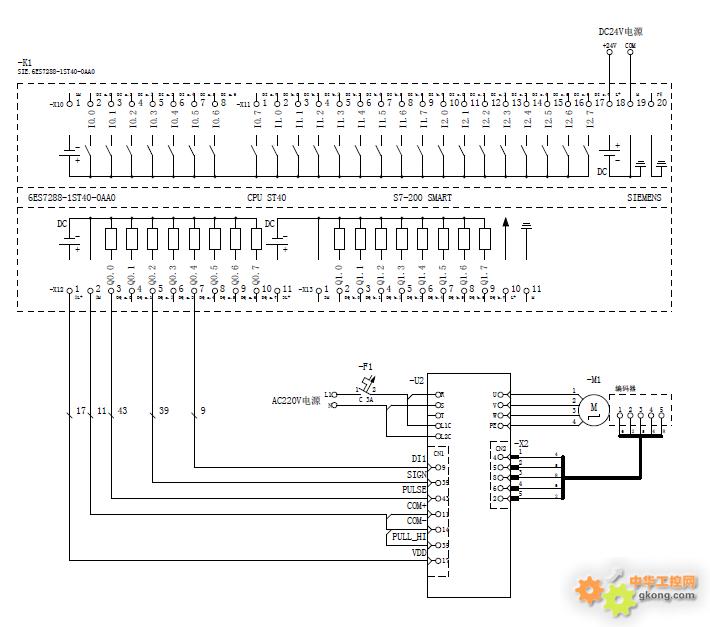
简单画个接线图,S7-200 SMART晶体管型PNP输出形式,对应台达B2伺服说明书接线图,图示如下
![附件 1.jpg]()
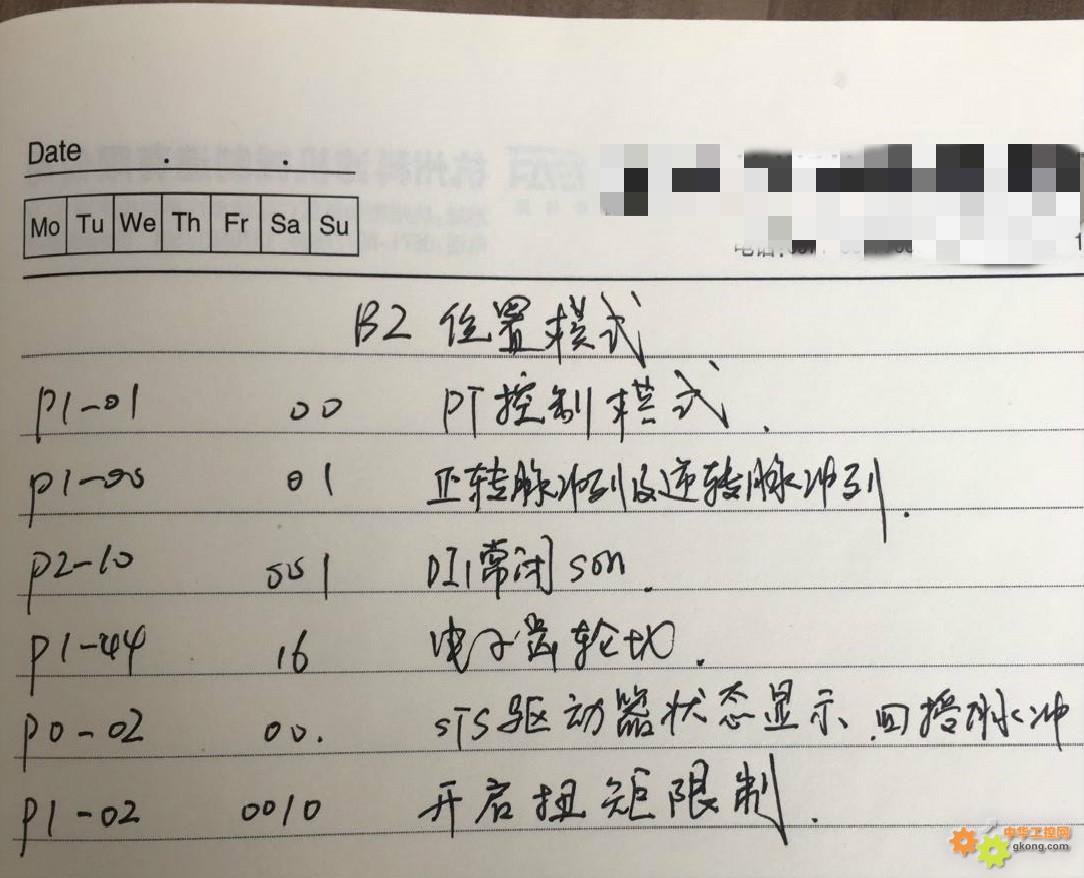
伺服参数设置,其他功能简略
![附件 2_meitu_1.jpg]()
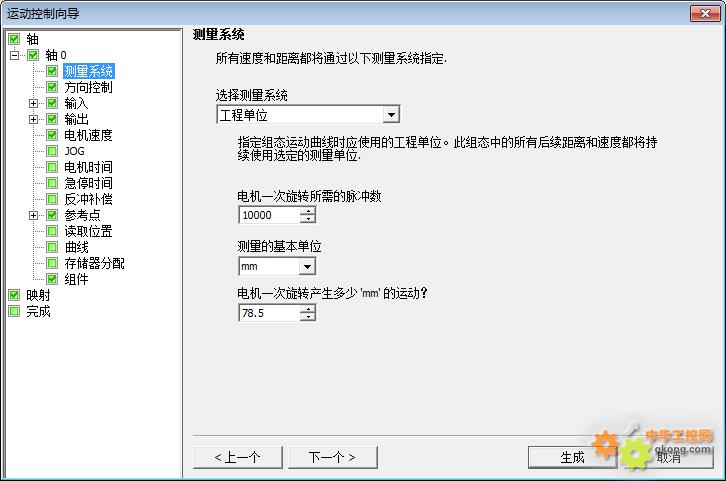
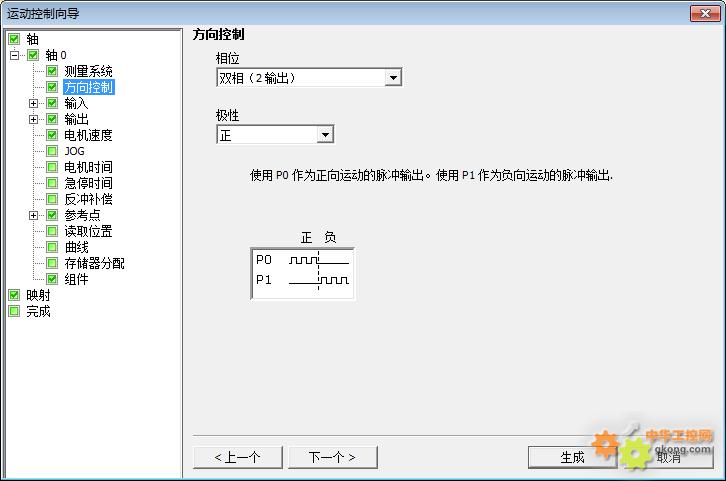
使用运动控制向导生成子程序,此处根据伺服电机编码器精度设置,精度为17-bit(160000 p/rev),参数中设置电子齿轮比为16,那么电机转一圈需要160000/16=10000个脉冲
![附件 11.jpg]()
![附件 22.jpg]()
![附件 33.jpg]() 其他功能简略。
其他功能简略。
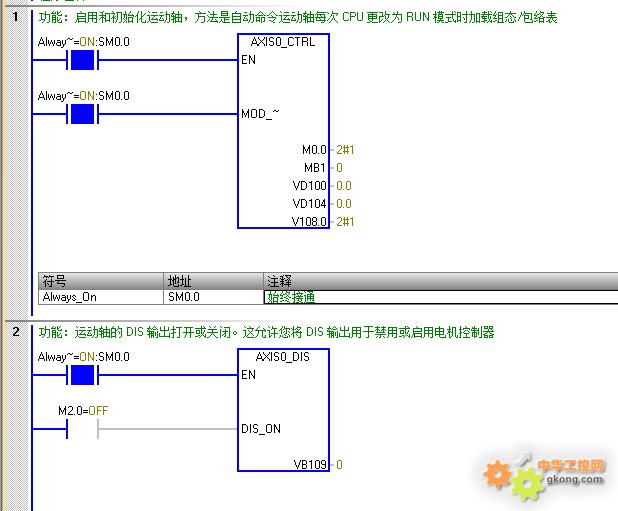
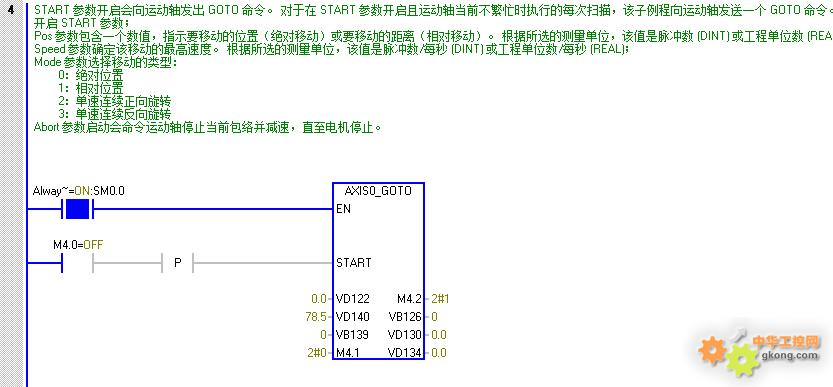
组态运动控制后,需要调用相关子程序使用。
![附件 111.jpg]()
![附件 222.jpg]()
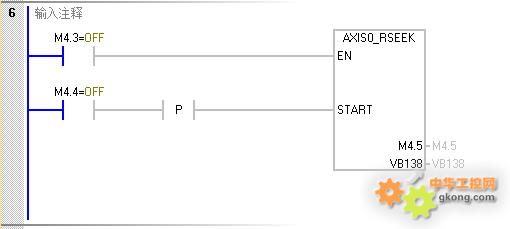
如需绝对位置控制,则需添加回原点子程序,有些机器都是开机自动回原点的,回原点方式不再叙述。
![附件 333.jpg]()
新手可以参考下,也为我自己记录一下,下次使用更便捷。
伺服参数设置,其他功能简略
使用运动控制向导生成子程序,此处根据伺服电机编码器精度设置,精度为17-bit(160000 p/rev),参数中设置电子齿轮比为16,那么电机转一圈需要160000/16=10000个脉冲

组态运动控制后,需要调用相关子程序使用。
如需绝对位置控制,则需添加回原点子程序,有些机器都是开机自动回原点的,回原点方式不再叙述。
新手可以参考下,也为我自己记录一下,下次使用更便捷。
[此贴子已经被作者于2018/8/7 8:36:18编辑过]