














发表于:2018/7/27 9:04:35
#0楼
各位朋友,大家好。关于全闭环控制,前些日子我发了个帖子咨询过,控制目的是将全闭环做到PLC这边来,伺服只做执行机构。相对于伺服本身全闭环这样做的好处有很多:1,控制成本低。2:开环/闭环切换方便。3:响应更快。
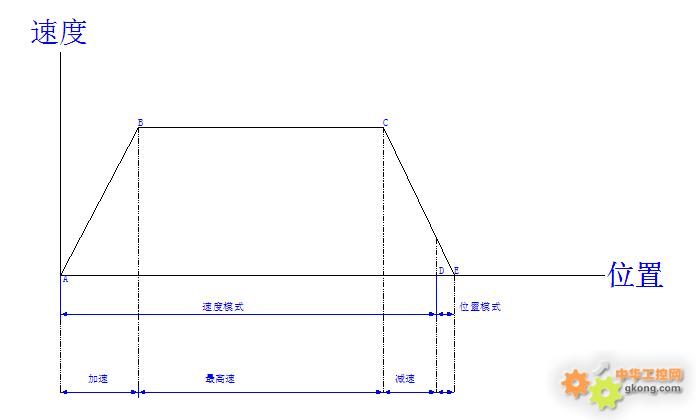
当前大家都说不行,应该是我问的方式有问题,实际上可以做,只不过不是实时改变目标值的方法来实现。近些天查了些资料,有一种方法可以做到PLC全闭环控制伺服。具体做法:外部编码器的反馈值与设定值作比较,通过算法得出加速、减速、匀速、定位近值等数据,如图所示,定位目标值为E,PLC先以速度模式运行到D(其中有加速、匀速、减速过程),然后切换到位置模式,到达目标值后,定位停止,以此来达到全闭环的控制目的
控制理论是行得通的,但实际呢,还是有诸多问题,欢迎大家讨论。明天我将提着编码器去客户现场测试
![附件 PLC闭环.jpg]()
当前大家都说不行,应该是我问的方式有问题,实际上可以做,只不过不是实时改变目标值的方法来实现。近些天查了些资料,有一种方法可以做到PLC全闭环控制伺服。具体做法:外部编码器的反馈值与设定值作比较,通过算法得出加速、减速、匀速、定位近值等数据,如图所示,定位目标值为E,PLC先以速度模式运行到D(其中有加速、匀速、减速过程),然后切换到位置模式,到达目标值后,定位停止,以此来达到全闭环的控制目的
控制理论是行得通的,但实际呢,还是有诸多问题,欢迎大家讨论。明天我将提着编码器去客户现场测试
[此贴子已经被作者于2018/7/27 9:06:33编辑过]





