














发表于:2018/2/8 15:48:46
#0楼
何为 ADAS系统 :
高级驾驶辅助系统 [ADAS] 是利用安装在机动车上的各种传感器,在行驶过程中随时来感应周围的环境并收集数据,从而 进行静态、动态物体的辨识与追踪,并结合导航仪地图数据,进行系统的运算与分析,从而预先使驾驶者感知到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。
ADAS 系统的出现将掀起旅行和公路运输货物的革命,同时提高驾驶安全性。它有望为所有年龄人群提供更大的活动自由度,并且能提高汽车运行的效率。同时,它能通过消除人为错误和分心而驾驶威胁,从而降低事故率。
![附件 1.jpg]()
虽然传感器不断改进,但是目前来讲,依旧没有保障安全驾驶的单个传感器。必须选择一套互为 补充的正交传感器,其通过提供关键信息和冗余优化驾驶性能,以确保始终安全。典型的传感器 套件包括雷达、激光雷达、超声波传感器和可见光相机等。
在本篇文章中,我们将向您介绍红外热成像技术独特的优势——在复杂的驾驶环境中能够检测和区分人与其它生物,向传感器套件中 添加红外热成像技术的益处。
为什么典型的 ADAS 环境中采用多种传感器?
ADAS的驾驶状况变化很大,选择的传感器套件不仅能在城市、乡村和公路环境中正常运行,而且必须在一切天气条件、白天和黑夜中始终表现良好,这意味着每种驾驶环境都伴随着极大地挑战 和不同需求。
若要实现自动驾驶,需要整套传感器来协调工作,如不仅能进行可靠监测而且具有内置冗余以防 止传感器发生故障。目前,没有一项技术能集成完全自动驾驶必需的所有功能。每个传感器可单 独用于检测,或被“融合”用于在中央电子控制单元(ECU)或车辆中央计算机内作出决策。
自动驾驶系统采用数种方法,但是核心处理途径是先检测随后对物体进行分类,以确定车辆应采 取的一系列措施。如雷达和激光雷达系统能够检测道路上或道路周围的物体,但如配有用于分类 和识别物体的红外热像传感器,让您对自己的态势感知信心满满。雷达和激光雷达系统根据其收 集到的反射信号产生一个点密度云并计算物体距离和接近速度,但是与红外热像传感器相比,其 分辨率较低,并且无法轻松识别物体。由于分辨率较低这一特性,为了优化在不同范围的检测能 力,制造商可能会在汽车中安装多种装置,如用于自适应巡航控制的远程雷达和用于紧急制动辅 助的中程雷达等。
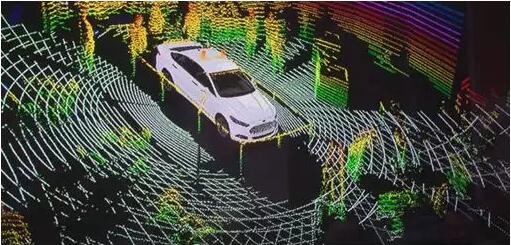
如果一名行人从两辆汽车中间穿过,将有很微弱甚至无用于识别潜在风险的反射信号。激光雷达 系统可提供更高的信息密度。但是,如果物体距离较远或车辆以较高速度行驶时,激光雷达系统 几乎无法对物体进行分类。这些通常较昂贵的旋转装置具有更高的数据传输速率,但是其长期稳 定性未经验证。同时,固态装置具有更强的稳健性且成本可能更低,但是拥有更少的目标点,尤其是当从较远的距离观测物体时。
![附件 2.jpg]()
激光雷达能够检测到物体,但是无法对其进行分类。红外热像传感器可为配备 ADAS 的机动车提供可采取正确行动所需的数据。
为了以经济划算且可靠的(冗余的)解决方案生成物体分类所需数量的数据,雷达或激光雷达很 可能需要在大部分白天条件下结合来自一部可见光相机的输出,在夜间或昏暗的白天条件下结合 来自一台红外热像传感器的输出。这些系统协作,便可检测路边的物体。然而,如前所述,分类是任何检测性能的一个重要部分。(未完待续)
在下一篇文章中,我们将与您分享ADAS系统中加入红外热像传感器的诸多优势 :
雷达和激光雷达通常用于物体检测、距离测量和测绘应用,而热像仪对物体分类、速度标志和红灯检测必不可少。在 ADAS传感器套件中加入红外热像传感器可提升驾驶系统和态势感知能力。
红外热像传感器的优势
◆ 即使在杂乱不堪的环境中亦能看清人和动物——热物体显而易见
◆ 即使在昏暗的照明条件下亦能看清物体——不受黑暗、烟雾、炫光的影响
◆ 当与可见光相机配合使用时,提供更多冗余,增强检测/分类——正交检测
◆ 可靠性——经汽车行业十余年应用的验证
高级驾驶辅助系统 [ADAS] 是利用安装在机动车上的各种传感器,在行驶过程中随时来感应周围的环境并收集数据,从而 进行静态、动态物体的辨识与追踪,并结合导航仪地图数据,进行系统的运算与分析,从而预先使驾驶者感知到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。
ADAS 系统的出现将掀起旅行和公路运输货物的革命,同时提高驾驶安全性。它有望为所有年龄人群提供更大的活动自由度,并且能提高汽车运行的效率。同时,它能通过消除人为错误和分心而驾驶威胁,从而降低事故率。

虽然传感器不断改进,但是目前来讲,依旧没有保障安全驾驶的单个传感器。必须选择一套互为 补充的正交传感器,其通过提供关键信息和冗余优化驾驶性能,以确保始终安全。典型的传感器 套件包括雷达、激光雷达、超声波传感器和可见光相机等。
在本篇文章中,我们将向您介绍红外热成像技术独特的优势——在复杂的驾驶环境中能够检测和区分人与其它生物,向传感器套件中 添加红外热成像技术的益处。
为什么典型的 ADAS 环境中采用多种传感器?
ADAS的驾驶状况变化很大,选择的传感器套件不仅能在城市、乡村和公路环境中正常运行,而且必须在一切天气条件、白天和黑夜中始终表现良好,这意味着每种驾驶环境都伴随着极大地挑战 和不同需求。
若要实现自动驾驶,需要整套传感器来协调工作,如不仅能进行可靠监测而且具有内置冗余以防 止传感器发生故障。目前,没有一项技术能集成完全自动驾驶必需的所有功能。每个传感器可单 独用于检测,或被“融合”用于在中央电子控制单元(ECU)或车辆中央计算机内作出决策。
自动驾驶系统采用数种方法,但是核心处理途径是先检测随后对物体进行分类,以确定车辆应采 取的一系列措施。如雷达和激光雷达系统能够检测道路上或道路周围的物体,但如配有用于分类 和识别物体的红外热像传感器,让您对自己的态势感知信心满满。雷达和激光雷达系统根据其收 集到的反射信号产生一个点密度云并计算物体距离和接近速度,但是与红外热像传感器相比,其 分辨率较低,并且无法轻松识别物体。由于分辨率较低这一特性,为了优化在不同范围的检测能 力,制造商可能会在汽车中安装多种装置,如用于自适应巡航控制的远程雷达和用于紧急制动辅 助的中程雷达等。
如果一名行人从两辆汽车中间穿过,将有很微弱甚至无用于识别潜在风险的反射信号。激光雷达 系统可提供更高的信息密度。但是,如果物体距离较远或车辆以较高速度行驶时,激光雷达系统 几乎无法对物体进行分类。这些通常较昂贵的旋转装置具有更高的数据传输速率,但是其长期稳 定性未经验证。同时,固态装置具有更强的稳健性且成本可能更低,但是拥有更少的目标点,尤其是当从较远的距离观测物体时。
激光雷达能够检测到物体,但是无法对其进行分类。红外热像传感器可为配备 ADAS 的机动车提供可采取正确行动所需的数据。
为了以经济划算且可靠的(冗余的)解决方案生成物体分类所需数量的数据,雷达或激光雷达很 可能需要在大部分白天条件下结合来自一部可见光相机的输出,在夜间或昏暗的白天条件下结合 来自一台红外热像传感器的输出。这些系统协作,便可检测路边的物体。然而,如前所述,分类是任何检测性能的一个重要部分。(未完待续)
在下一篇文章中,我们将与您分享ADAS系统中加入红外热像传感器的诸多优势 :
雷达和激光雷达通常用于物体检测、距离测量和测绘应用,而热像仪对物体分类、速度标志和红灯检测必不可少。在 ADAS传感器套件中加入红外热像传感器可提升驾驶系统和态势感知能力。
红外热像传感器的优势
◆ 即使在杂乱不堪的环境中亦能看清人和动物——热物体显而易见
◆ 即使在昏暗的照明条件下亦能看清物体——不受黑暗、烟雾、炫光的影响
◆ 当与可见光相机配合使用时,提供更多冗余,增强检测/分类——正交检测
◆ 可靠性——经汽车行业十余年应用的验证
[此贴子已经被作者于2018/2/8 15:49:57编辑过]




