发表于:2017/11/5 19:31:29
#0楼
各位
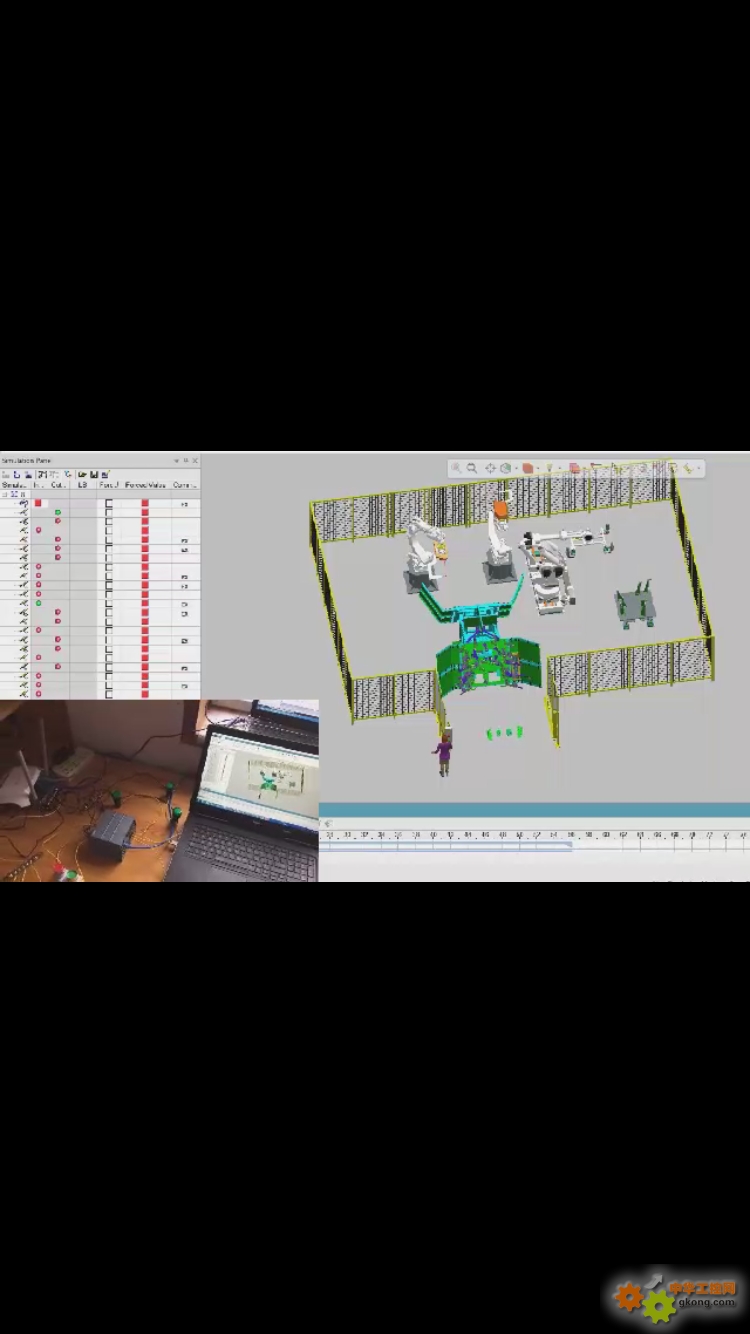
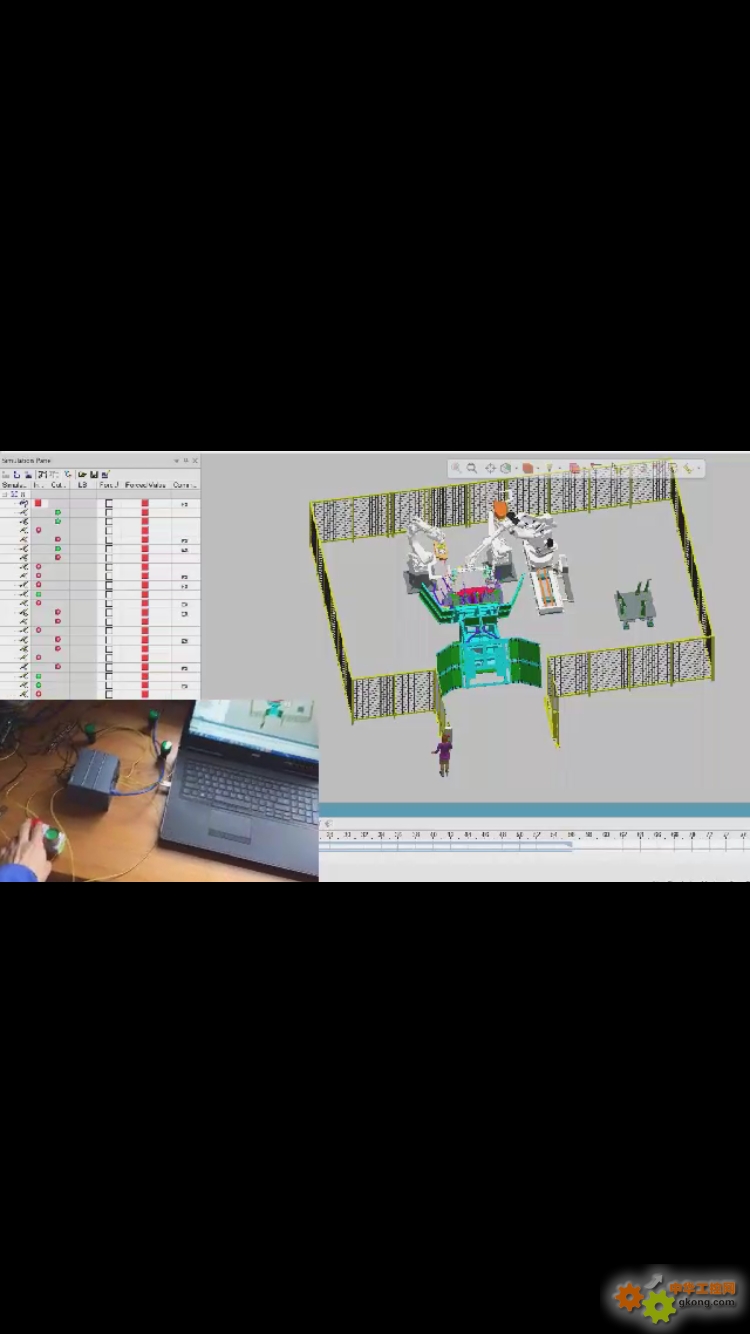
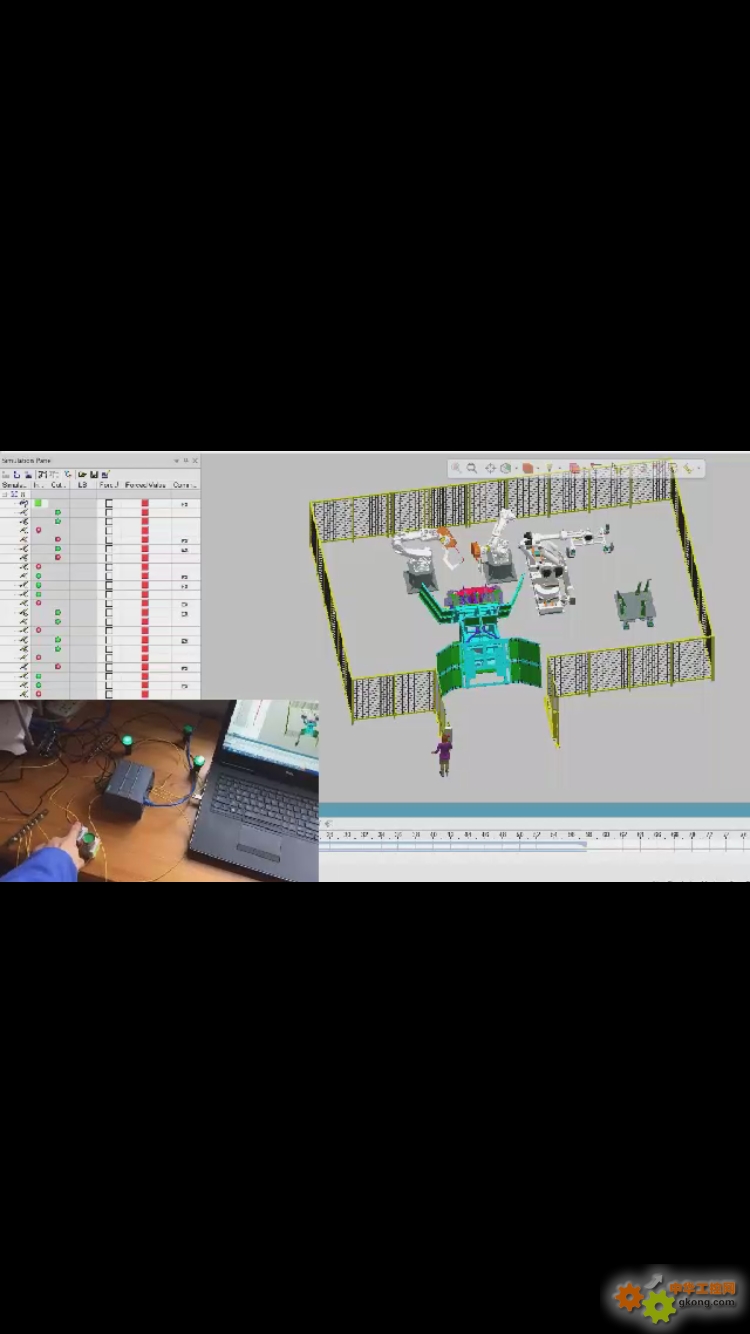
最近在网上看到关于使用西门子PDPS做虚拟调试的文章,貌似最近在汽车制造业中十分流行,可以有效的节省现场中对PLC及机械手和外围设备的调试时间,自己使用西门子的s1200PLC做了个简单的工位,通过外部plc控制模拟软件中的机器人和夹具,以及传感器等!如附件所示,想咨询各位这种虚拟调试在现场生产线的安装和机器人集成工作中使用的多不多,还是只是停留在理论阶段,也想结识各位准备在项目中使用虚拟调试的工程师一起研究探讨!
感谢
![附件 IMG_6948.jpg]()
![附件 IMG_6949.jpg]()
![附件 IMG_6950.jpg]()
![附件 IMG_6951.jpg]()
最近在网上看到关于使用西门子PDPS做虚拟调试的文章,貌似最近在汽车制造业中十分流行,可以有效的节省现场中对PLC及机械手和外围设备的调试时间,自己使用西门子的s1200PLC做了个简单的工位,通过外部plc控制模拟软件中的机器人和夹具,以及传感器等!如附件所示,想咨询各位这种虚拟调试在现场生产线的安装和机器人集成工作中使用的多不多,还是只是停留在理论阶段,也想结识各位准备在项目中使用虚拟调试的工程师一起研究探讨!
感谢