发表于:2015/7/9 16:59:33
#0楼
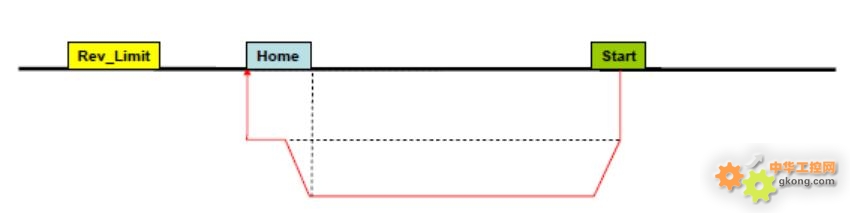
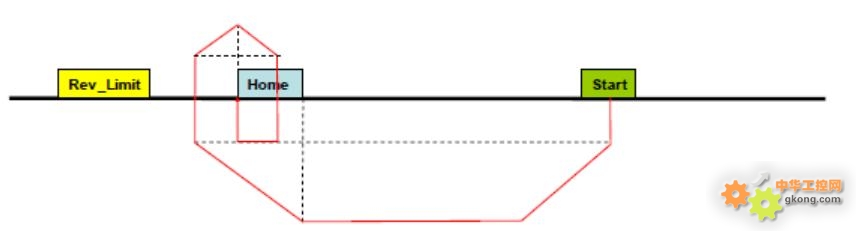
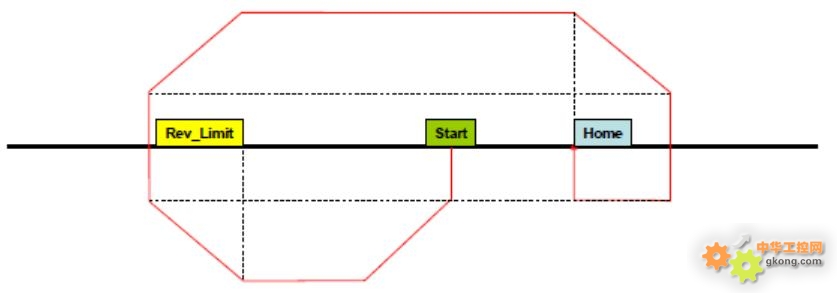
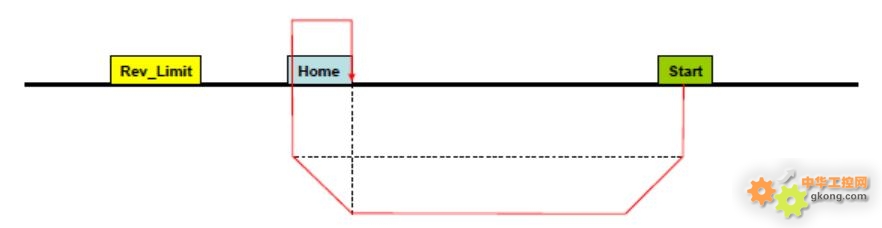
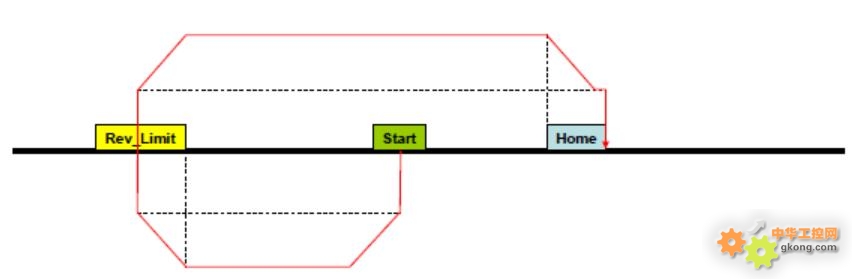
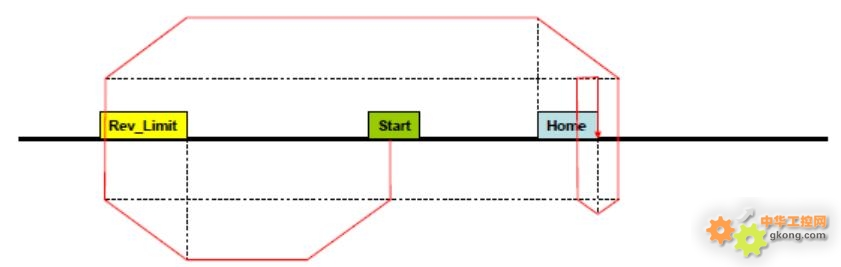
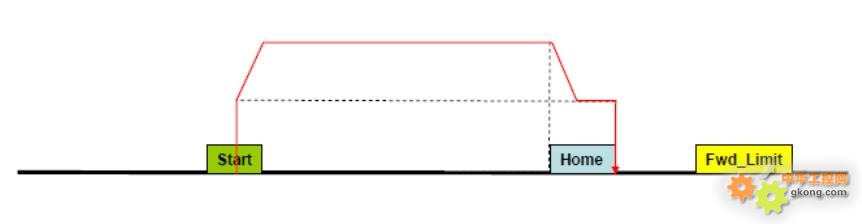
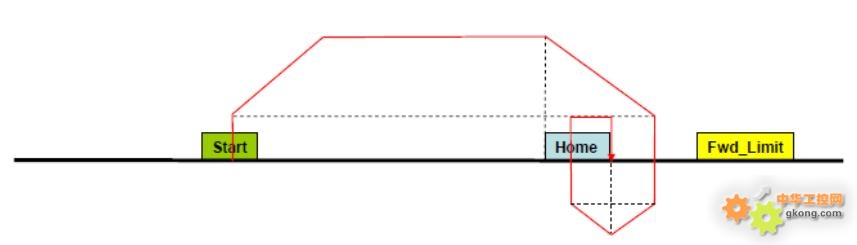
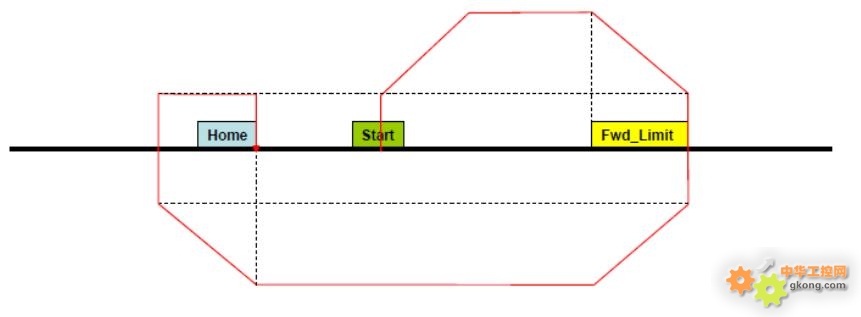
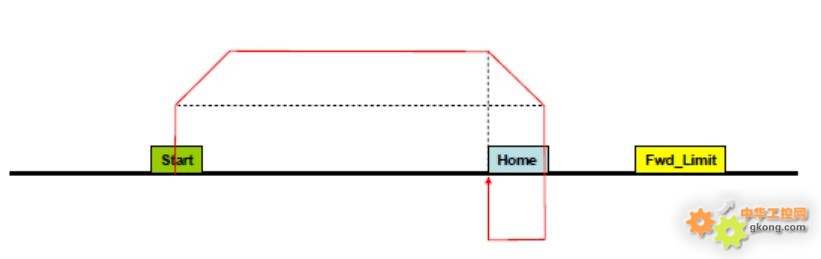
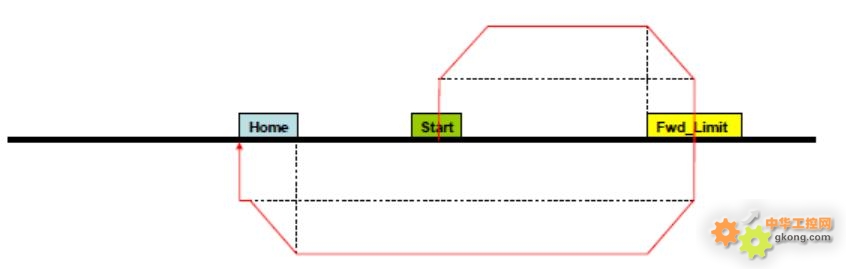
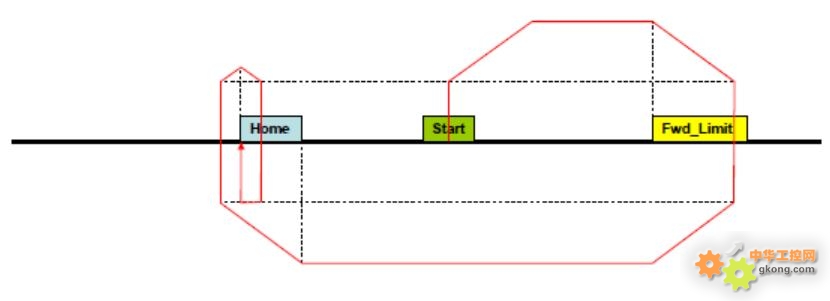
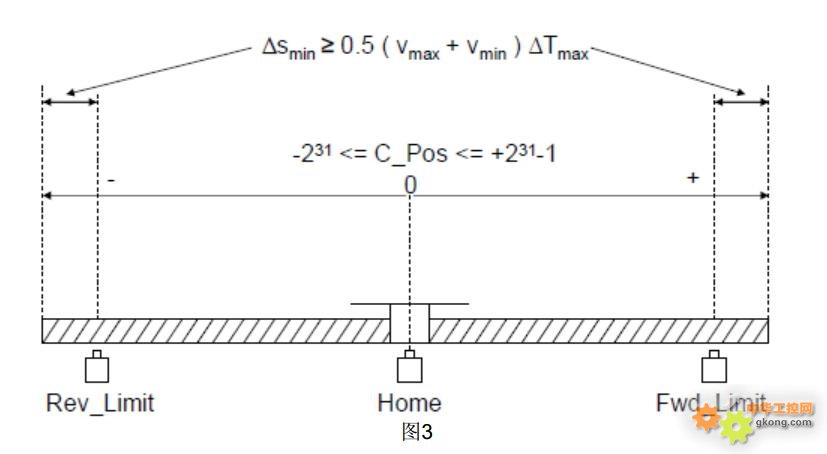
来源于[S7-200PLC脉冲输出MAP库文件的使用]一文 中关于寻找参考点的若干种情况, 对照图示与说明 ,琢磨了半天,总算是有了一点了解 了……
![附件 01.jpg]()
思想决定高度