发表于:2015/5/18 20:43:47
#0楼
我做的毕业设计是基于PLC4自由度机械手控制系统(要求实现
机械手的动作流程
上升 → 伸出 → 夹紧 → 缩回 →手腕正转90°→ 手臂正摆180°→ 手腕反转90°→ 下降 → 第二次伸出→ 松开→二次缩回→手臂反摆180°→ 延时
1)伸缩行程:500mm
2)伸缩速度:250mm/s
3)升降行程:300mm
4)升降速度:200mm/s
5)回转范围:0~180°
6)回转速度:180°/s
手腕运动参数:
1)回转范围:0~180°
2)回转速度:180°/s
)
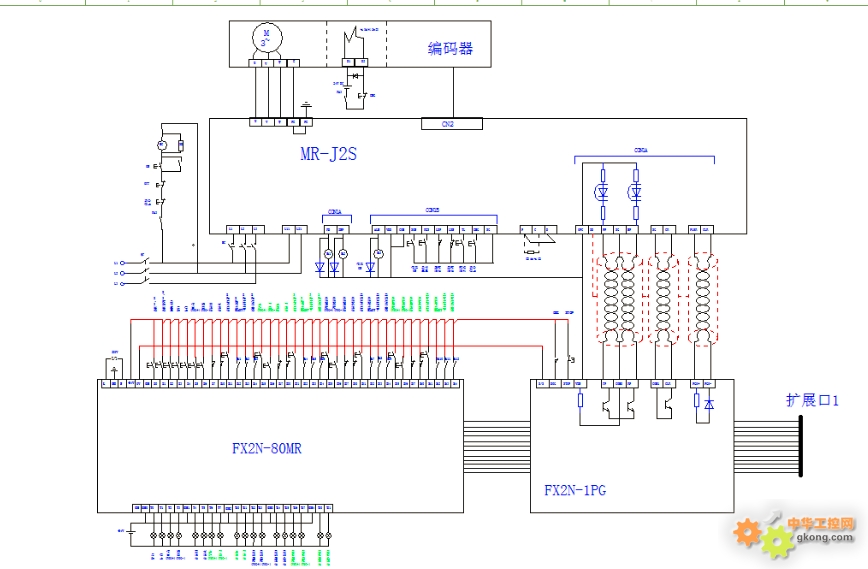
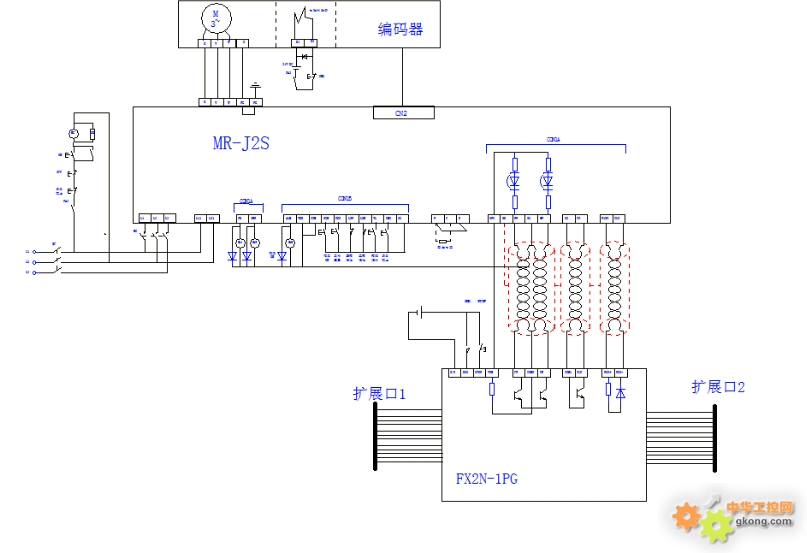
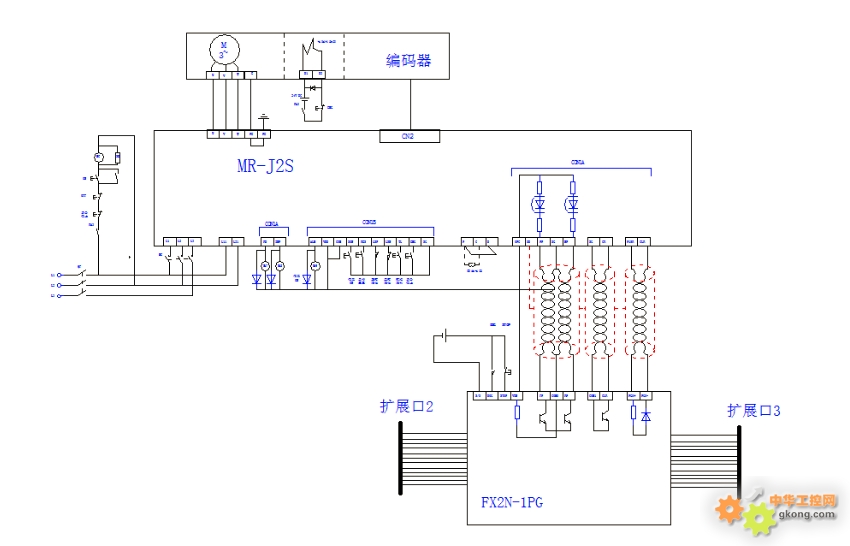
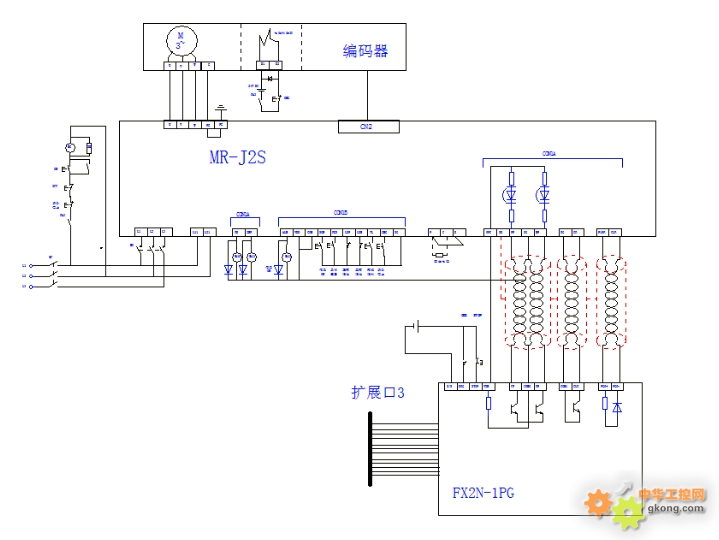
用了三菱PLC FX2N-80MR+4个1PG定位模块 + 4个伺服电机+4个伺服驱动器。这样用行不行哦。会不会太复杂了。好像价格有点高。
不知道怎么改进了。图都画出来了。感觉要改动好大了。求大神帮忙改下,看下错误![附件 1.jpg]()
![附件 2.jpg]()
![附件 3.jpg]()
![附件 4.jpg]()
机械手的动作流程
上升 → 伸出 → 夹紧 → 缩回 →手腕正转90°→ 手臂正摆180°→ 手腕反转90°→ 下降 → 第二次伸出→ 松开→二次缩回→手臂反摆180°→ 延时
1)伸缩行程:500mm
2)伸缩速度:250mm/s
3)升降行程:300mm
4)升降速度:200mm/s
5)回转范围:0~180°
6)回转速度:180°/s
手腕运动参数:
1)回转范围:0~180°
2)回转速度:180°/s
)
用了三菱PLC FX2N-80MR+4个1PG定位模块 + 4个伺服电机+4个伺服驱动器。这样用行不行哦。会不会太复杂了。好像价格有点高。
不知道怎么改进了。图都画出来了。感觉要改动好大了。求大神帮忙改下,看下错误