














发表于:2015/3/15 20:59:21
#0楼
目前在我们的工业控制中PID控制已经应用非常普遍,那什么是PID控制呢?有些人可能知之甚少有些人呢可能知道一些概念性的东西但倒底是怎么进行控制的就不知道了。总觉的听起来好像都是一些高等数学计算题谈虎色变,其实在实际的运算过程中不过是一些小学数学计算加减乘除四则运算。当然我就是这些人当中的一份子,不过最近通过学习才了解到其实并不是像我们想像的那样难。那么我从概念到计算再到参数整定这其中的学习心德分享给大家。
PID概念
首先从概念上给大家普及一下什么是PID:
PID就是比例控制P;积分控制I; 微分控制D三者的结合。单从名字上听起来好像很复杂,但其实现的过程是非常简单的那么我们就从最简单的二位控制开始从概念上来学习。
二位控制:
这是最简单的反馈控制,有时也叫开关控制。这种控制是当被测量达到最高值或最低值的时候,就给出一个开关的信号。虽然被测量可能是模拟量,但控制输出是开关的,所以叫两位控制。在工业现场,有许多温控器和液位开关控制是采用这种方式的,比如最常用的电接点压力表、电接点温度表就是二位控制。
比例控制P:
控制器的输出值与被控参数的测量值和设定值或某个参考点的偏差是一个比例关系。比例控制比二位控制要平滑一些,消除了二位控制时会产生的被控量上下振荡的情形。比如,对一个反应罐的液位,如果设定的液位值是2700毫米,当液位降低时,进料管道上的阀门就要增加开度,而液位偏高时,则要将开度减小。增加和减小的比例与液位和设定值的偏差大小成比例关系。
积分控制:
在积分控制中,被控变量的值的变化与控制系统输出控制到实际生效的时间有一个预先设定的关系。执行机构的输出是渐渐地达到设定的值的。这种控制方式的产生是由于实际的控制元件和执行机构从给出输出信号到使被控变量达到设定值往往需要一段时间。
最常见的例子是温度控制,比如,假定我们知道到煤气阀门的开度到60%的时候,热水器的水温能够达到适宜洗澡的45°,但是,当你把阀门一下子拧到60%的位置时,水依然是凉的,你必须等一下,水温升到45°左右的时候,就会稳定。如果控制系统不用积分控制,而只用比例控制,那么当阀门输出为60%时,这是输入的温度值可能依然只有20°,那么按照比例控制,既然偏差依然存在,则阀门的开度会继续加大,这样,当水温升到45°时,阀门的开度可能会达到了90%甚至更高,这时,虽然控制系统会通知阀门保持不动,但水温会继续升高,可能到了50°甚至60°,这时,阀门的开度会减小,但在减小到60%之前,水温都会继续上升,当阀门开度减到60%时,水温依然可能70°,一直当阀门的开度变成20%时,水温才会变成45°,这时阀门运动会停止,但水温却会继续下降,直到变成凉水,如果这时是冬天,可能你的情形还要糟糕。这就是没有积分控制的温度控制器会发生的情况。如果你有小孩,当孩子第一次操作热水器的阀门的时候,发生的情形就很像这种情况。
微分控制:
微分控制通常与比例和积分控制同时使用,由于积分控制有一个滞后,微分控制可以让控制对偏差的反应提前,以免控制系统的反应过于迟钝。微分控制与比例和积分控制同时使用,可以使被控状态更迅速地达到稳定状态,而又不会出现上文出现的振荡现象。
PID控制:
在实际的控制系统中,根据实际变量的情况,上述三种控制方式有时只有一种,有时是两种,有时三种同时采用。比例控制用P表示,积分控制用I表示,微分控制用D表示,根据采用的方式,分别称为P控制,PI控制,PID控制。其中,PID控制是控制系统最常见的控制模式。
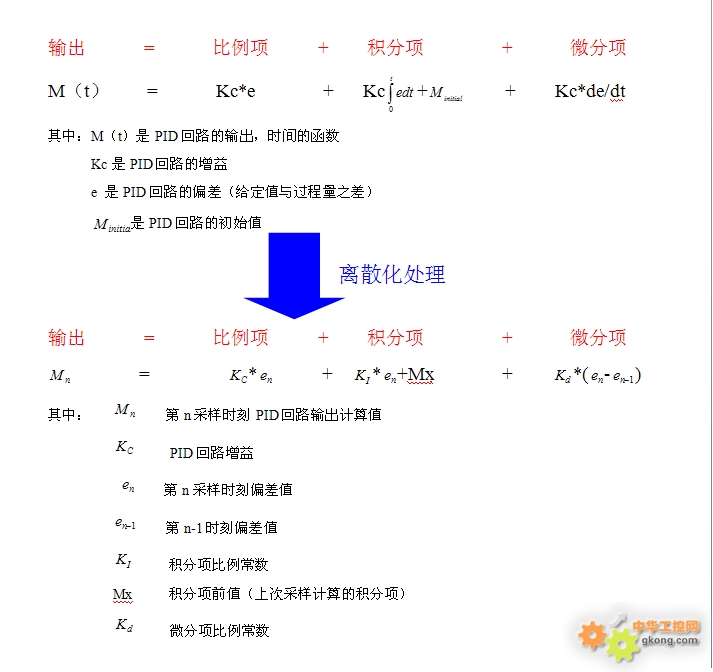
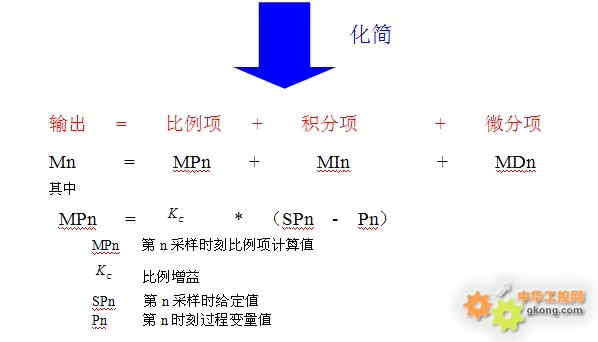
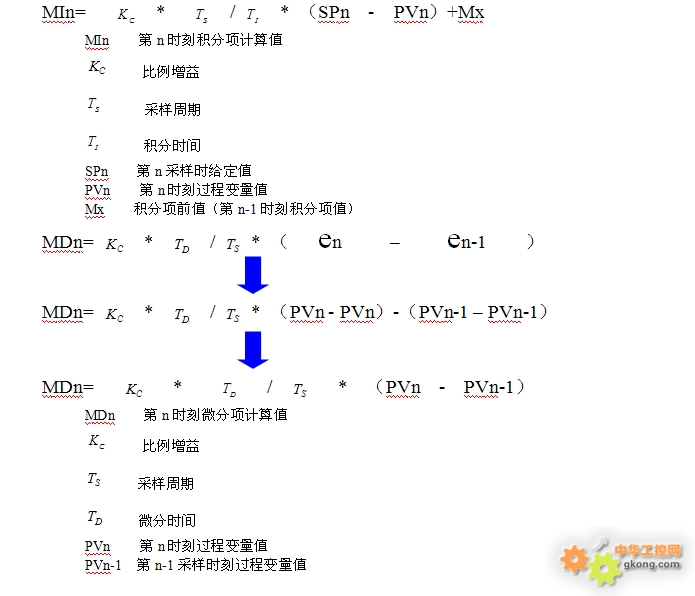
PID运算
通过上面的介绍大家肯定对PID控制有一个初步的了解,对PID的作用有了一定的认识。那么PID控制中到底是如何运算的呢。首先呢PID是一个闭环控制系统输出是比例控制项、积分控制项、微分控制项三者的和。在我们的实际控制中呢过程量都是一些的连续量,但在我们的计算机控制系统中都是定时(采样周期)对过程量采集的,所以在PID运算时是把连续的过程量离散性处理后再计算的,具体的过程我们慢慢分析。![附件 1.jpg]()
![附件 2.jpg]()
![附件 3.jpg]()
PID参数整定
用试凑法确定PID控制器参数
试凑法就是根据控制器各参数对系统性能的影响程度,边观察系统的运行,边修改参数,直到满意为止。一般情况下,增大比例系数KP会加快系统的响应速度,有利于减少静差。但过大的比例系数会使系统有较大的超调,并产生振荡使稳定性变差。减小积分系数KI将减少积分作用,有利于减少超调使系统稳定,但系统消除静差的速度慢。增加微分系数KD有利于加快系统的响应,是超调减少,稳定性增加,但对干扰的抑制能力会减弱。在试凑时,一般可根据以上参数对控制过程的影响趋势,对参数实行先比例、后积分、再微分的步骤进行整定。
比例部分整定。
首先将积分系数KI取无穷大(实际中能取多大就取多大)微分系数KD取零,即取消微分和积分作用,采用纯比例控制。将比例系数KP由小到大变化,观察系统的响应,直至速度快,且有一定范围的超调为止。如果系统静差在规定范围之内,且响应曲线已满足设计要求,那么只需用纯比例调节器即可。
积分部分整定。
如果比例控制系统的静差达不到设计要求,这时可以加入积分作用。在整定时将积分系数KI由大逐渐减小,积分作用就逐渐增强,观察输出会发现,系统的静差会逐渐减少直至消除。反复试验几次,直到消除静差的速度满意为止。注意这时的超调量会比原来加大,应适当的降低一点比例系数KP。
微分部分整定。
若使用比例积分(PI)控制器经反复调整仍达不到设计要求,或不稳定,这时应加入微分作用,整定时先将微分系数KD从零逐渐增加,观察超调量和稳定性,同时相应地微调比例系数KP、积分系数KI,逐步使凑,直到满意为止
扩充临界比例度法
这种方法适用于有自平衡的被控对象,是模拟系统中临界比例度法的扩充。其整定步骤如下:
(1)选择一个足够短的采样周期T。所谓足够短,就是采样周期小于对象的纯之后时间的1 /10。
(2)让系统作纯比例控制,并逐渐缩小比例度 ( =1/KP)是系统产生临界振荡。此时的比例度和振荡周期就是临界比例度 K和临界振荡周期TK。
(3)选定控制度。所谓控制度,就是以模拟调节器为基准,将系统的控制效果与模拟调节器的控制效果相比较,其比值即控制度。
PID概念
首先从概念上给大家普及一下什么是PID:
PID就是比例控制P;积分控制I; 微分控制D三者的结合。单从名字上听起来好像很复杂,但其实现的过程是非常简单的那么我们就从最简单的二位控制开始从概念上来学习。
二位控制:
这是最简单的反馈控制,有时也叫开关控制。这种控制是当被测量达到最高值或最低值的时候,就给出一个开关的信号。虽然被测量可能是模拟量,但控制输出是开关的,所以叫两位控制。在工业现场,有许多温控器和液位开关控制是采用这种方式的,比如最常用的电接点压力表、电接点温度表就是二位控制。
比例控制P:
控制器的输出值与被控参数的测量值和设定值或某个参考点的偏差是一个比例关系。比例控制比二位控制要平滑一些,消除了二位控制时会产生的被控量上下振荡的情形。比如,对一个反应罐的液位,如果设定的液位值是2700毫米,当液位降低时,进料管道上的阀门就要增加开度,而液位偏高时,则要将开度减小。增加和减小的比例与液位和设定值的偏差大小成比例关系。
积分控制:
在积分控制中,被控变量的值的变化与控制系统输出控制到实际生效的时间有一个预先设定的关系。执行机构的输出是渐渐地达到设定的值的。这种控制方式的产生是由于实际的控制元件和执行机构从给出输出信号到使被控变量达到设定值往往需要一段时间。
最常见的例子是温度控制,比如,假定我们知道到煤气阀门的开度到60%的时候,热水器的水温能够达到适宜洗澡的45°,但是,当你把阀门一下子拧到60%的位置时,水依然是凉的,你必须等一下,水温升到45°左右的时候,就会稳定。如果控制系统不用积分控制,而只用比例控制,那么当阀门输出为60%时,这是输入的温度值可能依然只有20°,那么按照比例控制,既然偏差依然存在,则阀门的开度会继续加大,这样,当水温升到45°时,阀门的开度可能会达到了90%甚至更高,这时,虽然控制系统会通知阀门保持不动,但水温会继续升高,可能到了50°甚至60°,这时,阀门的开度会减小,但在减小到60%之前,水温都会继续上升,当阀门开度减到60%时,水温依然可能70°,一直当阀门的开度变成20%时,水温才会变成45°,这时阀门运动会停止,但水温却会继续下降,直到变成凉水,如果这时是冬天,可能你的情形还要糟糕。这就是没有积分控制的温度控制器会发生的情况。如果你有小孩,当孩子第一次操作热水器的阀门的时候,发生的情形就很像这种情况。
微分控制:
微分控制通常与比例和积分控制同时使用,由于积分控制有一个滞后,微分控制可以让控制对偏差的反应提前,以免控制系统的反应过于迟钝。微分控制与比例和积分控制同时使用,可以使被控状态更迅速地达到稳定状态,而又不会出现上文出现的振荡现象。
PID控制:
在实际的控制系统中,根据实际变量的情况,上述三种控制方式有时只有一种,有时是两种,有时三种同时采用。比例控制用P表示,积分控制用I表示,微分控制用D表示,根据采用的方式,分别称为P控制,PI控制,PID控制。其中,PID控制是控制系统最常见的控制模式。
PID运算
通过上面的介绍大家肯定对PID控制有一个初步的了解,对PID的作用有了一定的认识。那么PID控制中到底是如何运算的呢。首先呢PID是一个闭环控制系统输出是比例控制项、积分控制项、微分控制项三者的和。在我们的实际控制中呢过程量都是一些的连续量,但在我们的计算机控制系统中都是定时(采样周期)对过程量采集的,所以在PID运算时是把连续的过程量离散性处理后再计算的,具体的过程我们慢慢分析。
PID参数整定
用试凑法确定PID控制器参数
试凑法就是根据控制器各参数对系统性能的影响程度,边观察系统的运行,边修改参数,直到满意为止。一般情况下,增大比例系数KP会加快系统的响应速度,有利于减少静差。但过大的比例系数会使系统有较大的超调,并产生振荡使稳定性变差。减小积分系数KI将减少积分作用,有利于减少超调使系统稳定,但系统消除静差的速度慢。增加微分系数KD有利于加快系统的响应,是超调减少,稳定性增加,但对干扰的抑制能力会减弱。在试凑时,一般可根据以上参数对控制过程的影响趋势,对参数实行先比例、后积分、再微分的步骤进行整定。
比例部分整定。
首先将积分系数KI取无穷大(实际中能取多大就取多大)微分系数KD取零,即取消微分和积分作用,采用纯比例控制。将比例系数KP由小到大变化,观察系统的响应,直至速度快,且有一定范围的超调为止。如果系统静差在规定范围之内,且响应曲线已满足设计要求,那么只需用纯比例调节器即可。
积分部分整定。
如果比例控制系统的静差达不到设计要求,这时可以加入积分作用。在整定时将积分系数KI由大逐渐减小,积分作用就逐渐增强,观察输出会发现,系统的静差会逐渐减少直至消除。反复试验几次,直到消除静差的速度满意为止。注意这时的超调量会比原来加大,应适当的降低一点比例系数KP。
微分部分整定。
若使用比例积分(PI)控制器经反复调整仍达不到设计要求,或不稳定,这时应加入微分作用,整定时先将微分系数KD从零逐渐增加,观察超调量和稳定性,同时相应地微调比例系数KP、积分系数KI,逐步使凑,直到满意为止
扩充临界比例度法
这种方法适用于有自平衡的被控对象,是模拟系统中临界比例度法的扩充。其整定步骤如下:
(1)选择一个足够短的采样周期T。所谓足够短,就是采样周期小于对象的纯之后时间的1 /10。
(2)让系统作纯比例控制,并逐渐缩小比例度 ( =1/KP)是系统产生临界振荡。此时的比例度和振荡周期就是临界比例度 K和临界振荡周期TK。
(3)选定控制度。所谓控制度,就是以模拟调节器为基准,将系统的控制效果与模拟调节器的控制效果相比较,其比值即控制度。
非淡泊无以明志,非宁静无以致远。



