返回工控网首页
|
| 添加到收藏夹
中国自动化学会专家咨询工作委员会指定宣传媒体
免费注册
广告服务
|
客服中心
您现在所在的是:
PLC论坛
工控论坛首页
→
PLC论坛
→ 浏览主题:
西门子PLC300
回帖:
3
个,阅读:
600
次
[上一页]
[1]
[下一页]
* 帖子主题:
西门子PLC300
收藏
分享到
845
244306717
文章数:
16
年度积分:
50
历史总积分:
845
作者的所有帖子(16)
注册时间:
2012/11/15
发站内信
发表于:2015/1/22 10:56:41
#0楼
请问这段程序怎么理解
【方案】
华北工控工业平板电脑方案,让医疗监护仪实现更高效的信息交互
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
结帖
|
管理
845
244306717
文章数:
16
年度积分:
50
历史总积分:
845
作者的所有帖子(16)
注册时间:
2012/11/15
发站内信
发表于:2015/1/22 11:12:43
#1楼
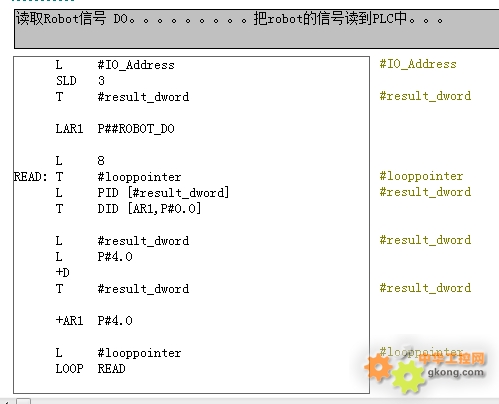
这是一段PLC读取机器人DO信号的程序 怎么理解
【方案】
台达机电产品在纯净水包装机上的应用
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
8485
fujifa
文章数:
2955
年度积分:
55
历史总积分:
8485
作者的所有帖子(2955)
注册时间:
2014/2/10
发站内信
2017论坛贡献奖
2016论坛贡献奖
2015论坛贡献奖
发表于:2015/1/22 11:54:11
#2楼
以下是引用
244306717
在
2015/1/22 10:56:41
的发言:
请问这段程序怎么理解
L #IO_Address //装入IO地址,请注意,这里地址还不是真正的地址。
SLD 3 //左移3位,形成真正的指针地址。
T #result_dword //保存指针
LAR1 P##ROBOT_DO //装入ROBOT_DO指针
L 8
READ:T #looppointer //循环变量设为8
L PID【result_dword】 //装入地址为result_dword的内容
T DID【AR1,P#0.0】 //保存到背景数据块中,地址为 ROBOT_DO+0.0
接下来result_dword+4.0,移动指针
+AR1,4.0性质相同,也是移动指针
。。。。。循环
大致就是这个意思,如果翻译成C语言的话,大致相当于就是:
int *p1,*p2;
for(i=0;i<=8;i++)
{
*p2=*p1;
p1++;
p2++;
}
精通富士POD,富士PLC的编程
有问题可以直接电邮:FUJIFA@yeah.net
【方案】
台达DOP系列人机界面实用通信实例
只看该作者
|
赞
[3]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
2451
gsxiaojian
文章数:
170
年度积分:
50
历史总积分:
2451
作者的所有帖子(170)
注册时间:
2007/11/29
发站内信
发表于:2015/1/22 11:57:07
#3楼
1.读取DO的起始地址
2.左移3位
3.存放至result_dword
4.装载指针P#ROBOT_DO至AR1
5.装载循环次数
6.将循环次数赋值到looppointer
7.装载DO的地址(地址指向result_dword的值)
8.传送至DI的存储地址(地址指向P#ROBOT_DO的值,偏移0)
9.result_dword加4个字节(指向下一个双字地址)
10.P#ROBOT_DO增加4个字节
11.判断循环次数是否完成8次,没有的话跳转到READ,继续执行循环程序
【方案】
技术资讯 | XTS 动子可用作机器人的替代方案
只看该作者
|
赞
[1]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
工控学堂推荐视频:
PLC学习视频
变频器学习视频
西门子学习视频
三菱学习视频
更多学习视频>>
•
[视频课程]一个小时教你学会升降输送系统编程方法
•
[视频课程]零基础快速入门西门子S7-1500PLC
•
[视频课程]西门子S7-200SMART如何快速找回原点
•
[视频课程]三菱PLC程序进制转化你懂了吗
•
[视频课程]台达DVP系列入门精讲
•
[视频课程]七节课带你全面认识西门子S7-1200
•
[视频课程]西门子S7-1500TCPU应用
•
[视频课程]西门子S7-1200与欧姆龙温控仪表的自由口通信
•
[视频课程]西门子S7-200SMART带参数子程序使用详解
46.8003