发表于:2013/11/25 14:35:13
#0楼

本书可作为高等院校电气传动自动化、机电一体化、电机及其控制、电力电子技术等专业的研究生和高年级本科生的教材用书,特别适合工程技术人员从事相关设计和研发时用做指导性参考书。
全文目录:
前言
第1章绪论1
1.1交流伺服系统的国内外现状与发展趋势1
1.2交流伺服系统的分类和特点3
1.3交流伺服系统在国内相关行业中的应用及研发意义 7
1.4本书主要涉及的内容和安排9
第2章三相交流永磁同步电动机11
2.1永磁同步电动机转子的结构和特征11
2.2永磁同步电动机的数学模型12
2.2.1坐标变换的原则和基本思路13
2.2.2坐标变换阵14
2.2.3建立dq坐标系下的数学模型17
2.3永磁同步电动机的特性常数21
2.3.1转矩常数和反电动势常数21
2.3.2机械时间常数、电气时间常数和
机电时间常数 23
2.4永磁同步电动机转矩波动26
2.4.1纹波转矩26
2.4.2齿槽转矩27
2.5永磁同步电动机控制系统28
2.5.1基本电磁关系轨迹29
2.5.2矢量控制策略32
2.5.3基于id=0控制策略的伺服
系统基本结构37
第3章电动机驱动电源和功率器件39
3.1逆变电路39
3.1.1基本工作原理39
3.1.2三相桥式电压型逆变电路40
3.1.3多电平逆变电路42
3.2重要的辅助电路43
3.2.1整流单元43
3.2.2预充电电路44
3.2.3泵升电压保护电路45
3.3功率器件47
3.3.1功率器件的种类和发展47
3.3.2IGBT49
3.3.3器件的驱动50
3.3.4器件的保护53
3.4智能功率模块(IPM)56
3.4.1接口电路56
3.4.2电压自举电路57
3.4.3保护功能59
第4章PWM控制技术60
4.1PWM控制的基本原理60
4.2三种典型的PWM控制技术61
4.2.1正弦波PWM技术61
4.2.2电流跟踪PWM技术63
4.2.3电压空间矢量PWM技术65
4.3逆变器品质评价67
4.3.1谐波成分67
4.3.2直流电压利用率与过调制72
4.3.3三种PWM控制技术的小结76
4.4数字化伺服系统中SVPWM的实现76
第5章数字控制系统83
5.1基础知识83
5.1.1信号采样和香农采样定理83
5.1.2信号复现和零阶保持器86
5.1.3量化误差和极限环89
5.1.4系统中的延迟91
5.1.5z变换及离散化方法92
5.2数字控制器研究方法96
5.2.1模拟化研究方法概述96
5.2.2数字化研究方法概述97
5.3微处理器选择97
5.3.1选择处理器的基本原则97
5.3.2伺服控制系统要求的处理器性能98
5.3.3数字信号处理器(DSP)99
5. 4系统中的混合地设计103
第6章传感器技术和检测数据处理106
6.1电流传感器106
6.1.1利用霍尔元件检测106
6.1.2利用分流电阻检测107
6.2速度传感器110
6.3位置传感器110
6.3.1光电式增量型编码器111
6.3.2光电式绝对型编码器112
6.3.3旋转变压器与R-D变换器114
6.4检测数据处理118
6.4.1过采样和A-D分辨率118
6.4.2转速估计和编码器分辨率121
6.4.3数据标幺化和定标123
第7章三闭环控制系统127
7.1三闭环系统构成127
7.2系统的基本研究内容128
7.2.1系统的稳定性及稳态裕度128
7.2.2典型系统129
7.2.3指令响应和扰动响应131
7.2.4误差与稳态误差134
7.3电流/速度环控制策略135
7.3.1反电动势补偿136
7.3.2PI控制与IP控制138
7.3.3扰动解耦140
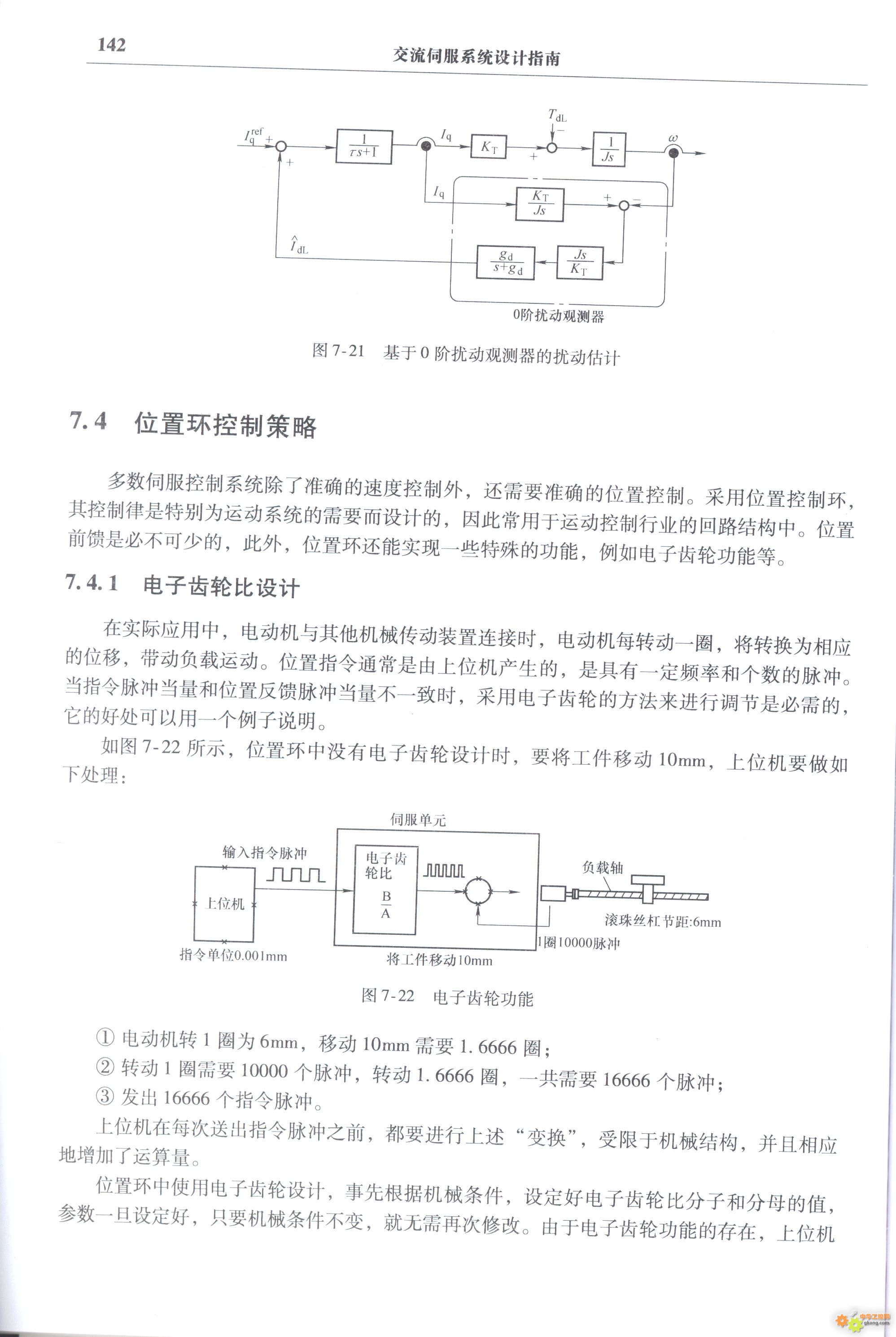
7.4位置环控制策略142
7.4.1电子齿轮比设计142
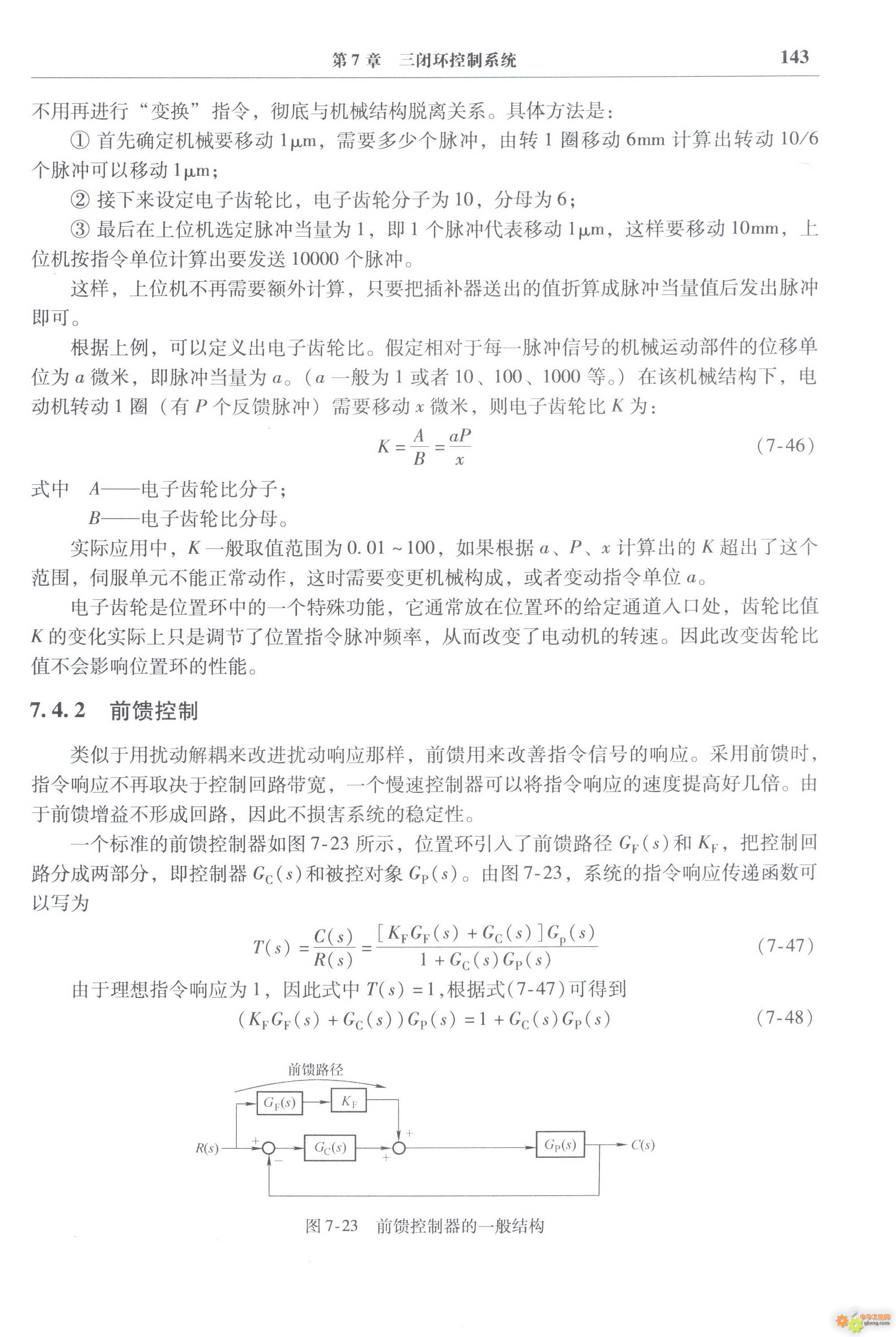
7.4.2前馈控制143
7.4.3半闭环与全闭环146
7.5抑振控制策略147
7.5.1振动模型148
7.5.2不稳定分析149
7.5.3被动式抑振和主动式抑振151
第8章控制器155
8.1伺服控制系统中的控制器155
8.2PID控制器实现156
8.2.1数字积分和微分156
8.2.2数字PID表达式161
8.2.3积分饱和与抗饱和设计162
8.2.4 PI+控制165
8.3PID控制器的人工调试166
8.3.1Ziegler-Nichols法166
8.3.2按“典型 Ⅰ 型和 Ⅱ 型系统的工程设计”法166
8.3.3手动调整170
8.4PID 控制器的自动调试171
8.4.1离线自整定172
8.4.2在线自校正173
第9章数字滤波器175
9.1伺服系统中的滤波器175
9.2低通和陷波滤波器176
9.2.1滤波器特征176
9.2.2基于模拟方式的实现179
9.2.3基于IIR方式的实现180
9.3抗混叠滤波器182
9.3.1混叠183
9.3.2开关电容滤波器的实现184
9.4转速估计滤波器186
9.4.1转速估计方法的介绍186
9.4.2基于FIR方式的实现188
9.5位置指令滤波器191
9.5.1S形曲线加减速191
9.5.2基于2次卷积法的实现193
第10章观测器196
10.1系统中的观测器196
10.2Luenberger观测器198
10.2.1观测器的模型构建198
10.2.2观测器的运行分析199
10.2.3观测器的应用设计201
10.3观测器在加速度反馈中的应用203
参考文献206
当当链接
欢迎大家关注“机械工业出版社E视界”微信订阅号,我们不做图书销售,我们只为传播知识。每周更新技术文章,帮助大家提升技能;推送前沿科技文章,告诉你科技也可以很有趣;还有赠书活动、资源下载等贴心服务,我们欢迎您的到来!