














发表于:2013/1/11 14:19:49
#0楼
惯性/导航/运动传感实验教学方案
系统简介
惯性/导航/运动传感实验教学及开发系统采用领先的现代智能传感器技术,包括三轴MEMS陀螺、三轴MEMS加速度计、三轴MEMS磁强计传感器,学生可分别作陀螺、加速度、磁场传感实验,倾角仪、电子罗盘和航姿综合实验等,该套实验系统有助于学生理解、熟悉、掌握惯性导航/航向姿态/运动状态测量的原理、技术及其应用。
另外公司也可基于这套系统进行惯性/导航/运动传感的项目和系统开发及通过转台测试产品。
功能特点
较低的价格,可以让所有学生亲自动手实验,引领国内惯性/导航/运动传感的实验教学进入普及化时代;
基于这套系统进行相关产品和项目的开发,可以大大降低开发难度,减少开发时间。
国内首家配备低价格电动转台,学生可做定量实验,更好的掌握惯性/导航/运动传感技术;
提供全面的教学和实验配套服务,减轻教师的负担;
集成度高,包含了各类运动相关传感器;
实验覆盖全面,从单一运动传感器实验到所有运动传感器融合的综合实验;
通过自身在国内惯性/导航/运动传感领域的领先技术,实现该实验室方案的不断升级,真正在实践方面使高校教学/实验水平跟上技术发展的潮流;
可为学校量身定做相关实验系统;
![附件]()
实验设备
惯导/航姿模块(3DM-E10A)
该模块是一款微型的全姿态测量传感装置,它由三轴MEMS陀螺、三轴MEMS加速度计、三轴磁阻型磁强计等三种类型的传感器构成。三轴陀螺用于测量载体三个方向的的绝对角速率,三轴加速度计用于测量载体三个方向的加速度,在系统工作中,主要作用是感知系统的水平方向的倾斜,并用于修正陀螺在俯仰和滚动方向的漂移,三轴磁阻型磁强计测量三维地磁强度,用于提供方向角的初始对准以及修正航向角漂移。可提供的输出数据有:原始数据、四元数、姿态数据等。
双轴电动转台(TT-3DM-2E-10)
机械台体采用UO形铝合金框架结构,由内环横滚轴框架和外环俯仰轴框架组成相互垂直的转动架构,采用直流电机驱动旋转,实现三维空间任意位置和角度的姿态测量。具有位置、速率和摇摆三种测试功能。
负载尺寸:50mm×50mm×50mm;
负载重量:0.2 kg;
双轴转角范围:连续无限(可以根据需要限位);
角位置综合测量精度:±0.08º;
控制到位精度:±0.01º;
速率范围:0.1º/s~50 º/s;
速率精度与平稳度:1%;
台体外形尺寸:510mmL×200mmW×469mmH;
双轴采集控制器(CC-3DM-2E-10)
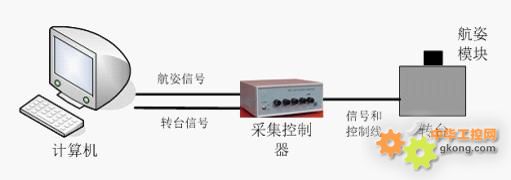
采集控制器通过USB或串行接口连接计算机实现航姿模块信号的采集与电动转台的测量控制。
测角数据采集频率:20Hz;
外形尺寸:260mmW×230mmW×88mmH;
串口波特率:115200 bps;
工作电源:220VAC/200W。
三轴电动转台(TT-3DM-3E-10)
机械台体采用UOO形铝合金框架结构,由内环横滚轴框架、中环俯仰轴框架和外环方位轴框架组成相互垂直的三维转动架构。采用直流电机驱动旋转,实现三维空间任意位置和角度的连续姿态测量。具有位置、速率和摇摆三种测试功能。。
负载尺寸:50mm×50mm×50mm;
负载重量:0.2 kg;
三轴转角范围:连续无限(可以根据需要限位);
角位置综合测量精度:±0.08º;
控制到位精度:±0.01º;
速率范围:0.1º/s~50 º/s;
速率精度与平稳度:1%;
台体外形尺寸:510mmL×200mmW×469mmH;
三轴采集控制器(CC-3DM-3E-10)
采集控制器通过USB或串行接口连接计算机实现航姿模块信号的采集与电动转台的测量控制。
测角数据采集频率:20Hz;
外形尺寸:260mmW×230mmW×88mmH;
串口波特率:115200 bps;
工作电源:220VAC/300W。
实验内容
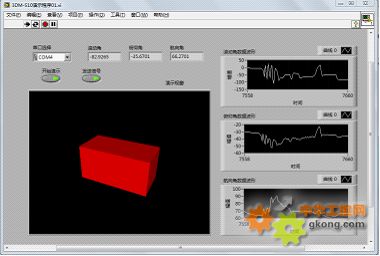
![附件]() 飞机航姿演示图
飞机航姿演示图
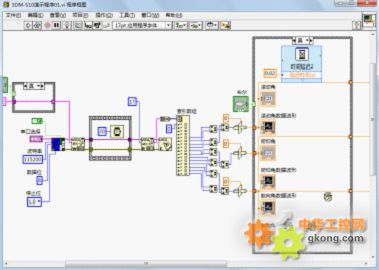
![附件]() Labview设计图
Labview设计图
![附件]() Labview运行图
Labview运行图
本科阶段实验:
系统连接和安装实验
系统软件安装和配置实验
转台三维位置调整实验
转台电动旋转实验
三轴加速度传感器静态测量实验
三轴加速度传感器动态测量实验
三轴加速度传感器计算速度实验(选配)
三轴加速度传感器计算位移实验(选配)
加速度零位偏移测量与计算实验(选配)
三轴加速度传感器计算单轴静态倾角仪实验(选配)
三轴加速度传感器计算双轴静态倾角仪实验(选配)
三轴陀螺传感器静态测量实验
三轴陀螺传感器动态测量实验
陀螺零位偏移测量与计算实验(选配)
三轴磁传感器静态测量实验
三轴磁传感器在磁场变化情况下的测量实验
振动计设计实验(选配)
电子罗盘设计实验(选配)
惯性导航/航向姿态定量的比对实验
研究生阶段实验(选配)
陀螺误差建模实验
陀螺温度补偿实验
陀螺标定实验
加速度传感器误差建模实验
加速度传感器标定实验
磁传感器硬磁补偿实验
磁传感器软磁补偿实验
电子罗盘设计高级实验
姿态解算实验
四元数解算实验
基于卡尔曼滤波的多信息融合算法实验
捷联导航解算方法实验
系统配置清单
序号 名称 型号 单位 数量 备注
1 惯导/航姿模块 3DM-E10A 个 1
2 双轴电动转台 TT-3DM-2E-10 个 1 可选配三轴电动转台
3 双轴采集控制器 CC-3DM-2E-10 个 1 可选配三轴采集控制器
4 软件光盘 张 1
5 连接线及电源线 套 1 整套线材
实验室配置
可根据经费和实验室的大小来配置实验系统套数,效果比较好的配置是每2到3名学生一套,使每个学生都有条件完全独自的做实验。
实验室也可以分期建设,前期少配些套数,后面再逐步配置齐全
系统简介
惯性/导航/运动传感实验教学及开发系统采用领先的现代智能传感器技术,包括三轴MEMS陀螺、三轴MEMS加速度计、三轴MEMS磁强计传感器,学生可分别作陀螺、加速度、磁场传感实验,倾角仪、电子罗盘和航姿综合实验等,该套实验系统有助于学生理解、熟悉、掌握惯性导航/航向姿态/运动状态测量的原理、技术及其应用。
另外公司也可基于这套系统进行惯性/导航/运动传感的项目和系统开发及通过转台测试产品。
功能特点
较低的价格,可以让所有学生亲自动手实验,引领国内惯性/导航/运动传感的实验教学进入普及化时代;
基于这套系统进行相关产品和项目的开发,可以大大降低开发难度,减少开发时间。
国内首家配备低价格电动转台,学生可做定量实验,更好的掌握惯性/导航/运动传感技术;
提供全面的教学和实验配套服务,减轻教师的负担;
集成度高,包含了各类运动相关传感器;
实验覆盖全面,从单一运动传感器实验到所有运动传感器融合的综合实验;
通过自身在国内惯性/导航/运动传感领域的领先技术,实现该实验室方案的不断升级,真正在实践方面使高校教学/实验水平跟上技术发展的潮流;
可为学校量身定做相关实验系统;

实验设备
惯导/航姿模块(3DM-E10A)
该模块是一款微型的全姿态测量传感装置,它由三轴MEMS陀螺、三轴MEMS加速度计、三轴磁阻型磁强计等三种类型的传感器构成。三轴陀螺用于测量载体三个方向的的绝对角速率,三轴加速度计用于测量载体三个方向的加速度,在系统工作中,主要作用是感知系统的水平方向的倾斜,并用于修正陀螺在俯仰和滚动方向的漂移,三轴磁阻型磁强计测量三维地磁强度,用于提供方向角的初始对准以及修正航向角漂移。可提供的输出数据有:原始数据、四元数、姿态数据等。
双轴电动转台(TT-3DM-2E-10)
机械台体采用UO形铝合金框架结构,由内环横滚轴框架和外环俯仰轴框架组成相互垂直的转动架构,采用直流电机驱动旋转,实现三维空间任意位置和角度的姿态测量。具有位置、速率和摇摆三种测试功能。
负载尺寸:50mm×50mm×50mm;
负载重量:0.2 kg;
双轴转角范围:连续无限(可以根据需要限位);
角位置综合测量精度:±0.08º;
控制到位精度:±0.01º;
速率范围:0.1º/s~50 º/s;
速率精度与平稳度:1%;
台体外形尺寸:510mmL×200mmW×469mmH;
双轴采集控制器(CC-3DM-2E-10)
采集控制器通过USB或串行接口连接计算机实现航姿模块信号的采集与电动转台的测量控制。
测角数据采集频率:20Hz;
外形尺寸:260mmW×230mmW×88mmH;
串口波特率:115200 bps;
工作电源:220VAC/200W。
三轴电动转台(TT-3DM-3E-10)
机械台体采用UOO形铝合金框架结构,由内环横滚轴框架、中环俯仰轴框架和外环方位轴框架组成相互垂直的三维转动架构。采用直流电机驱动旋转,实现三维空间任意位置和角度的连续姿态测量。具有位置、速率和摇摆三种测试功能。。
负载尺寸:50mm×50mm×50mm;
负载重量:0.2 kg;
三轴转角范围:连续无限(可以根据需要限位);
角位置综合测量精度:±0.08º;
控制到位精度:±0.01º;
速率范围:0.1º/s~50 º/s;
速率精度与平稳度:1%;
台体外形尺寸:510mmL×200mmW×469mmH;
三轴采集控制器(CC-3DM-3E-10)
采集控制器通过USB或串行接口连接计算机实现航姿模块信号的采集与电动转台的测量控制。
测角数据采集频率:20Hz;
外形尺寸:260mmW×230mmW×88mmH;
串口波特率:115200 bps;
工作电源:220VAC/300W。
实验内容
本科阶段实验:
系统连接和安装实验
系统软件安装和配置实验
转台三维位置调整实验
转台电动旋转实验
三轴加速度传感器静态测量实验
三轴加速度传感器动态测量实验
三轴加速度传感器计算速度实验(选配)
三轴加速度传感器计算位移实验(选配)
加速度零位偏移测量与计算实验(选配)
三轴加速度传感器计算单轴静态倾角仪实验(选配)
三轴加速度传感器计算双轴静态倾角仪实验(选配)
三轴陀螺传感器静态测量实验
三轴陀螺传感器动态测量实验
陀螺零位偏移测量与计算实验(选配)
三轴磁传感器静态测量实验
三轴磁传感器在磁场变化情况下的测量实验
振动计设计实验(选配)
电子罗盘设计实验(选配)
惯性导航/航向姿态定量的比对实验
研究生阶段实验(选配)
陀螺误差建模实验
陀螺温度补偿实验
陀螺标定实验
加速度传感器误差建模实验
加速度传感器标定实验
磁传感器硬磁补偿实验
磁传感器软磁补偿实验
电子罗盘设计高级实验
姿态解算实验
四元数解算实验
基于卡尔曼滤波的多信息融合算法实验
捷联导航解算方法实验
系统配置清单
序号 名称 型号 单位 数量 备注
1 惯导/航姿模块 3DM-E10A 个 1
2 双轴电动转台 TT-3DM-2E-10 个 1 可选配三轴电动转台
3 双轴采集控制器 CC-3DM-2E-10 个 1 可选配三轴采集控制器
4 软件光盘 张 1
5 连接线及电源线 套 1 整套线材
实验室配置
可根据经费和实验室的大小来配置实验系统套数,效果比较好的配置是每2到3名学生一套,使每个学生都有条件完全独自的做实验。
实验室也可以分期建设,前期少配些套数,后面再逐步配置齐全
