发表于:2012/9/29 11:49:35
#0楼
直接转矩控制也称之为“直接自控制”,这种“直接自控制”的思想是以转矩为中心来进行磁链、转矩的综合控制。和矢量变频器的控制不同,直接转矩控制不采用解耦的方式,从而在算法上不存在旋转坐标变换,简单地通过检测电动机定子电压和电流,借助瞬时空间矢量理论计算电动机的磁链和转矩,并根据与给定值比较所得差值,实现磁链和转矩的直接控制。
直接转矩控制技术,是利用空间矢量、定子磁场定向的分析方法,直接在定子坐标系下分析异步电动机的数学模型,计算与控制异步电动机的磁链和转矩,采用离散的两点式调节器(band—band控制),把转矩检测值与转矩给定值作比较,使转矩波动限制在一定的容差范围内,容差的大小由频率调节器来控制,并产生pwm脉宽调制信号,直接对逆变器的开关状态进行控制,以获得高动态性能的转矩输出。它的控制效果不取决于异步电动机的数学模型是否能够简化,而是取决于转矩的实际状况,它不需要将交流电动机与直流电动机作比较、等效、转化,即不需要模仿直流电动机的控制,由于它省掉了矢量变换方式的坐标变换与计算和为解耦而简化异步电动机数学模型,没有通常的pwm脉宽调制信号发生器,所以它的控制结构简单、控制信号处理的物理概念明确、系统的转矩响应迅速且无超调,是一种具有高静、动态性能的交流调速控制方式。
与矢量控制方式比较,直接转矩控制磁场定向所用的是定子磁链,它采用离散的电压状态和六边形磁链轨迹或近似圆形磁链轨迹的概念。只要知道定子电阻就可以把它观测出来。而矢量控制磁场定向所用的是转子磁链,观测转子磁链需要知道电动机转子电阻和电感。因此直接转矩控制大大减少了矢量控制技术中控制性能易受参数变化影响的问题。直接转矩控制强调的是转矩的直接控制与效果。与矢量控制方法不同,它不是通过控制电流、磁链等量来间接控制转矩,而是把转矩直接作为被控量,对转矩的直接控制或直接控制转矩,既直接又简化。
直接转矩控制对交流传动来说是一个优秀的电动机控制方法,它可以对所有交流电动机的核心变量进行直接控制。它开发出交流传动前所未有的能力并给所有的应用提供了益处。在dtc中,定子磁通和转矩被作为主要的控制变量。高速数字信号处理器与先进的电动机软件模型相结合使电动机的状态每秒钟被更新40,000次。由于电动机状态以及实际值和给定值的比较值被不断地更新,逆变器的每一次开关状态都是单独确定的。这意味着传动可以产生最佳的开关组合并对负载扰动和瞬时掉电等动态变化做出快速响应。在dtc中不需要对电压,频率分别控制的pwm调制器。
1 dtc直接转矩控制的速度控制性能
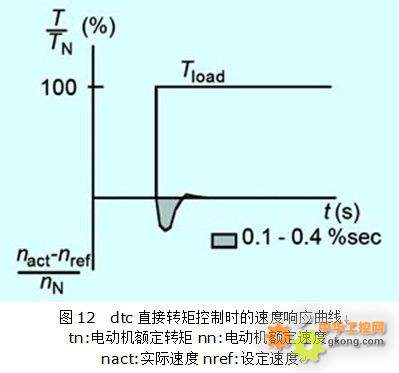
abb的acs800能够对速度进行精确的控制,根据不同的速度精度可以选择无脉冲编码器和有脉冲编码器两种,下表1给出了在使用dtc直接转矩控制时的典型速度性能指标。
其中动态速度误差依赖于速度控制器的参数整定,图12为动态速度响应曲线。
在参数组23中可以对速度控制器进行pid变量设定,速度控制器的原理见图13a,该控制器包含了比例、微分、积分和微分加速度补偿,其经过pid作用后的输出作为转矩控制器的给定信号。
速度控制器的参数内容包括以下几方面:
(1) 增益参数:定义速度控制器的比例增益,如增益过大可能引起速度波动。
(2) 积分时间参数:定义速度控制器的积分时间,即在偏差阶跃信号下,控制器输出信号的变化率。积分时间越短,连续偏差值的校正就越快,但是如果太短就会造成控制不稳定。
(3) 微分时间参数:定义速度控制器的微分时间,即在偏差值发生改变的情况下增加控制器的输出。微分时间越长,在偏差改变的过程中,控制器的输出速度就越快。微分作用使控制对扰动的敏感度增加。
(4) 加速补偿的微分时间:在加速过程中为了补偿惯性,将给定变化量的微分加到速度控制器的输出中。
(5) 滑差增益:定义了电动机滑差补偿控制的滑差增益,100%表示完全滑差补偿、0%表示零滑差补偿。
速度控制器的参数值能在电动机辨识(与矢量控制的电动机辨识相同)整定期间进行自动调节,当然也可以手动整定控制器的相关参数,或是让变频器单独执行一次速度控制器自动整定运行。要注意的是,最终速度控制器的控制效果取决于各个参数的综合作用,因此电动机带载运行进行自整定才是最合适的,同时可以在电动机额定转速的三分之一作用进行恒速度运行。
6.3 dtc直接转矩控制的转矩控制性能
直接转矩控制技术对于转矩的控制非常出色,即使不使用任何来自电动机轴上的速度反馈,变频器也能进行精确的转矩控制。当然,由于在无脉冲编码器情况下的直接转矩控制,在零频附近运行时,线性误差和可重复性误差可能会较大,对于需用在此频段内的负载,建议采用有脉冲编码器的直接转矩控制。表2显示了在abb变频器acs800使用直接转矩控制时的典型转矩控制性能指标。
(b)dtc直接转矩控制时的转矩响应曲线
tn:电动机额定转矩 tref:设定转矩 tact:实际转矩
如图13(b)为直接转矩控制方式下的转矩响应曲线。
对于参数的设置,首先必须在参数99.02选择应用程序宏设定为t-ctrl转矩控制宏和参数99.04定义为dtc直接转矩控制,然后在参数组24中可以对转矩控制进行设定,参数内容包括:
(1)转矩给定的斜坡上升时间:就是从零增加到电动机额定转矩的时间;
(2)转矩给定的斜坡下降时间:就是从电动机额定转矩下降到零的时间。
转矩控制宏一般应用于需要控制电动机转矩的场合,如啮合辊控制、张力控制等。其默认的接线方式是:转矩给定值由模拟量输入口以电流信号提供,0ma对应0%、20ma对应100%的电动机额定转矩。
http://www.hybpqi.com/UploadFiles/2012092910364856111.jpg[/IMG]![图]()
![图]()
http://www.hybpqi.com
直接转矩控制技术,是利用空间矢量、定子磁场定向的分析方法,直接在定子坐标系下分析异步电动机的数学模型,计算与控制异步电动机的磁链和转矩,采用离散的两点式调节器(band—band控制),把转矩检测值与转矩给定值作比较,使转矩波动限制在一定的容差范围内,容差的大小由频率调节器来控制,并产生pwm脉宽调制信号,直接对逆变器的开关状态进行控制,以获得高动态性能的转矩输出。它的控制效果不取决于异步电动机的数学模型是否能够简化,而是取决于转矩的实际状况,它不需要将交流电动机与直流电动机作比较、等效、转化,即不需要模仿直流电动机的控制,由于它省掉了矢量变换方式的坐标变换与计算和为解耦而简化异步电动机数学模型,没有通常的pwm脉宽调制信号发生器,所以它的控制结构简单、控制信号处理的物理概念明确、系统的转矩响应迅速且无超调,是一种具有高静、动态性能的交流调速控制方式。
与矢量控制方式比较,直接转矩控制磁场定向所用的是定子磁链,它采用离散的电压状态和六边形磁链轨迹或近似圆形磁链轨迹的概念。只要知道定子电阻就可以把它观测出来。而矢量控制磁场定向所用的是转子磁链,观测转子磁链需要知道电动机转子电阻和电感。因此直接转矩控制大大减少了矢量控制技术中控制性能易受参数变化影响的问题。直接转矩控制强调的是转矩的直接控制与效果。与矢量控制方法不同,它不是通过控制电流、磁链等量来间接控制转矩,而是把转矩直接作为被控量,对转矩的直接控制或直接控制转矩,既直接又简化。
直接转矩控制对交流传动来说是一个优秀的电动机控制方法,它可以对所有交流电动机的核心变量进行直接控制。它开发出交流传动前所未有的能力并给所有的应用提供了益处。在dtc中,定子磁通和转矩被作为主要的控制变量。高速数字信号处理器与先进的电动机软件模型相结合使电动机的状态每秒钟被更新40,000次。由于电动机状态以及实际值和给定值的比较值被不断地更新,逆变器的每一次开关状态都是单独确定的。这意味着传动可以产生最佳的开关组合并对负载扰动和瞬时掉电等动态变化做出快速响应。在dtc中不需要对电压,频率分别控制的pwm调制器。
1 dtc直接转矩控制的速度控制性能
abb的acs800能够对速度进行精确的控制,根据不同的速度精度可以选择无脉冲编码器和有脉冲编码器两种,下表1给出了在使用dtc直接转矩控制时的典型速度性能指标。
其中动态速度误差依赖于速度控制器的参数整定,图12为动态速度响应曲线。
在参数组23中可以对速度控制器进行pid变量设定,速度控制器的原理见图13a,该控制器包含了比例、微分、积分和微分加速度补偿,其经过pid作用后的输出作为转矩控制器的给定信号。
速度控制器的参数内容包括以下几方面:
(1) 增益参数:定义速度控制器的比例增益,如增益过大可能引起速度波动。
(2) 积分时间参数:定义速度控制器的积分时间,即在偏差阶跃信号下,控制器输出信号的变化率。积分时间越短,连续偏差值的校正就越快,但是如果太短就会造成控制不稳定。
(3) 微分时间参数:定义速度控制器的微分时间,即在偏差值发生改变的情况下增加控制器的输出。微分时间越长,在偏差改变的过程中,控制器的输出速度就越快。微分作用使控制对扰动的敏感度增加。
(4) 加速补偿的微分时间:在加速过程中为了补偿惯性,将给定变化量的微分加到速度控制器的输出中。
(5) 滑差增益:定义了电动机滑差补偿控制的滑差增益,100%表示完全滑差补偿、0%表示零滑差补偿。
速度控制器的参数值能在电动机辨识(与矢量控制的电动机辨识相同)整定期间进行自动调节,当然也可以手动整定控制器的相关参数,或是让变频器单独执行一次速度控制器自动整定运行。要注意的是,最终速度控制器的控制效果取决于各个参数的综合作用,因此电动机带载运行进行自整定才是最合适的,同时可以在电动机额定转速的三分之一作用进行恒速度运行。
6.3 dtc直接转矩控制的转矩控制性能
直接转矩控制技术对于转矩的控制非常出色,即使不使用任何来自电动机轴上的速度反馈,变频器也能进行精确的转矩控制。当然,由于在无脉冲编码器情况下的直接转矩控制,在零频附近运行时,线性误差和可重复性误差可能会较大,对于需用在此频段内的负载,建议采用有脉冲编码器的直接转矩控制。表2显示了在abb变频器acs800使用直接转矩控制时的典型转矩控制性能指标。
(b)dtc直接转矩控制时的转矩响应曲线
tn:电动机额定转矩 tref:设定转矩 tact:实际转矩
如图13(b)为直接转矩控制方式下的转矩响应曲线。
对于参数的设置,首先必须在参数99.02选择应用程序宏设定为t-ctrl转矩控制宏和参数99.04定义为dtc直接转矩控制,然后在参数组24中可以对转矩控制进行设定,参数内容包括:
(1)转矩给定的斜坡上升时间:就是从零增加到电动机额定转矩的时间;
(2)转矩给定的斜坡下降时间:就是从电动机额定转矩下降到零的时间。
转矩控制宏一般应用于需要控制电动机转矩的场合,如啮合辊控制、张力控制等。其默认的接线方式是:转矩给定值由模拟量输入口以电流信号提供,0ma对应0%、20ma对应100%的电动机额定转矩。
http://www.hybpqi.com/UploadFiles/2012092910364856111.jpg[/IMG]
http://www.hybpqi.com
[此贴子已经被作者于2012/9/29 11:50:27编辑过]