返回工控网首页
|
| 添加到收藏夹
中国自动化学会专家咨询工作委员会指定宣传媒体
免费注册
广告服务
|
客服中心
您现在所在的是:
永宏FATEK
工控论坛首页
→
永宏FATEK
→ 浏览主题:
永宏PLC控制伺服作原点复归,为什么速度受伺服表格参数6的控制。
回帖:
8
个,阅读:
4343
次
[上一页]
[1]
[下一页]
* 帖子主题:
永宏PLC控制伺服作原点复归,为什么速度受伺服表格参数6的控制。
收藏
分享到
882
lovegcr
文章数:
27
年度积分:
50
历史总积分:
882
作者的所有帖子(27)
注册时间:
2011/2/28
发站内信
发表于:2011/10/23 22:45:12
#0楼
本人接触永宏PLC不就。为什么我用PLC控制伺服作原点复归动作模式,速度受伺服表格参数6,原点复归减速速度---。控制呢?我在伺服命令表格用MD0,D的模式控制伺服原点复归,输入频率是DR8000,DR8000,无论输入多少。。当前速度频率DR4080的数值是参数表格6(原点复归减速速度)的1000的数值,复归速度太慢了。。把参数6(原点复归减速速度)加大,2000或3000等10000都试了。复归速度是快了很多,但是停的位置不是的原点,超出原点位置,参数6的数值越大,跑出原点停止距离就越远,为什么速度频率不是伺服命令表格的速度输入频率控制呢!!很疑惑,要怎么做就不会受参数6(原点复归减速速度)的数值控制。求高手指点,给小弟说说原因,万分感谢。。小弟先谢过!!
【方案】
风电设施预防性维护
只看该作者
|
赞
[1]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
结帖
|
管理
805
657312528
文章数:
1
年度积分:
50
历史总积分:
805
作者的所有帖子(1)
注册时间:
2011/10/20
发站内信
发表于:2011/10/24 13:07:43
#1楼
此楼内容不符合板块规定,不予显示!
查看原帖内容>>
【方案】
红外热像仪在钢铁厂中的应用
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
1002
xuefung
文章数:
106
年度积分:
50
历史总积分:
1002
作者的所有帖子(106)
注册时间:
2011/9/23
发站内信
发表于:2011/10/24 16:22:40
#2楼
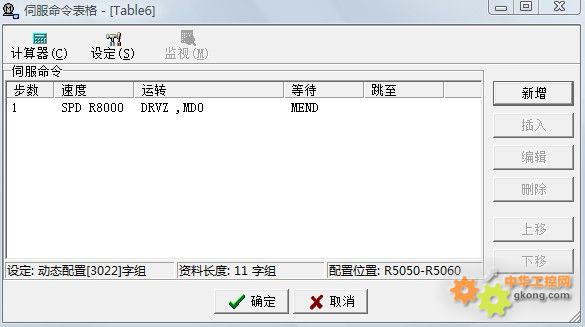
DR8000是碰到近点传感器之前的速度(快速),碰到近点传感器之后便以原点复归减速速度运行(低速),离开近点传感器瞬间,体制运行,该点即为原点。以上是MD0的运作方式。
【方案】
基于 PC 的控制技术助力优化石油和天然气生产
只看该作者
|
赞
[1]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
76
产品体验中心会员
控友华安
文章数:
24
年度积分:
-144
历史总积分:
76
作者的所有帖子(24)
注册时间:
2011/11/6
发站内信
发表于:2011/11/6 10:07:36
#3楼
此楼内容不符合板块规定,不予显示!
查看原帖内容>>
【方案】
英威腾DA200伺服系统在玻璃精雕机上的应用
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
1037
LRJ2011
文章数:
114
年度积分:
50
历史总积分:
1037
作者的所有帖子(114)
注册时间:
2011/10/28
发站内信
发表于:2012/1/12 14:52:13
#4楼
这个你要把R4056中的值改为346就可以实时修改速度的频率。参数6中数值为碰到原点信号后,就会以这个进行减速。
台灣永宏.FATEK : The Brand You Can Rely On
【方案】
可靠检测碳纤维增强聚合物材料
只看该作者
|
赞
[1]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
1033
294709682
文章数:
89
年度积分:
50
历史总积分:
1033
作者的所有帖子(89)
注册时间:
2011/4/2
发站内信
发表于:2012/1/14 8:50:06
#5楼
关于伺服定位
伺服定位可以像我这样做,很简单的实现控制。用MD0 什么原点复归功能太深奥,有什么不明白的可以联系我 QQ 1648576284 电话 18059872040、14759208013、(陈先生)
【方案】
TwinCAT 3 IoT OCPP 与 EL6761 EtherCAT 端子模块完美融合
只看该作者
|
赞
[1]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
998
th7588
文章数:
51
年度积分:
50
历史总积分:
998
作者的所有帖子(51)
注册时间:
2011/12/12
发站内信
发表于:2012/1/19 9:19:09
#6楼
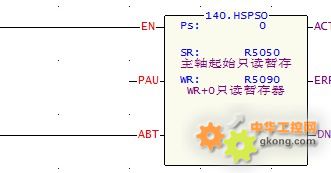
MD0模式时,FUN141指令必须设定参数6、参数9-1、参数15-0、参数16
复归时由FUN141指令中的参数9-1控制方向,由FUN140指令中的速度控制复归速度。当碰到近点感知器时,开始减速,减速时间由FUN141指令中的参数8设定,减速时间到速度减到FUN141指令中的参数6设定的速度开始运行,当到达FUN141指令中的参数16设定的原点位置时停止。
【方案】
台达C200变频器在专用机床的应用
只看该作者
|
赞
[1]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
1037
LRJ2011
文章数:
114
年度积分:
50
历史总积分:
1037
作者的所有帖子(114)
注册时间:
2011/10/28
发站内信
发表于:2012/3/26 14:07:15
#7楼
用MD0的找原点模式是挺好用的。
台灣永宏.FATEK : The Brand You Can Rely On
【方案】
台达产品在纺织上的整合应用
只看该作者
|
赞
[1]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
663
巍峨雪岭
文章数:
3
年度积分:
50
历史总积分:
663
作者的所有帖子(3)
注册时间:
2013/10/31
发站内信
发表于:2013/12/2 19:34:03
#8楼
回复 #4楼 LRJ2011
实时修改输出频率,这个在程序设计中应该怎么用?默认的是不能输出的,什么情况下要用到?如果用的话,用搬移指令赋值就行吗?小弟是初学者,谢谢啦!
【方案】
TURCK 传感器在风力发电行业中的应用
只看该作者
|
赞
[1]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
工控学堂推荐视频:
PLC学习视频
变频器学习视频
西门子学习视频
三菱学习视频
更多学习视频>>
•
[视频课程]一个小时教你学会升降输送系统编程方法
•
[视频课程]零基础快速入门西门子S7-1500PLC
•
[视频课程]西门子S7-200SMART如何快速找回原点
•
[视频课程]三菱PLC程序进制转化你懂了吗
•
[视频课程]台达DVP系列入门精讲
•
[视频课程]七节课带你全面认识西门子S7-1200
•
[视频课程]西门子S7-1500TCPU应用
•
[视频课程]西门子S7-1200与欧姆龙温控仪表的自由口通信
•
[视频课程]西门子S7-200SMART带参数子程序使用详解
109.2007