














发表于:2011/6/1 10:51:39
#0楼
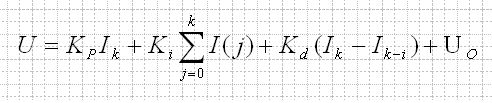
最近要做一个PID的控制,因为本科毕业后就没接触过这个,一些原理的东西都不太理解,有一些很基础的问题求解答:积分项中的误差累计,就是那个求和项,是从哪加到哪,是否是从最开始累积到当前,如果是从最开始累积到当前,那么当误差为零时积分项不能为零,输出是否还是要改变。
![附件]()
[此贴子已经被作者于2011/6/1 10:52:50编辑过]

