发表于:2010/6/7 22:18:46
#0楼
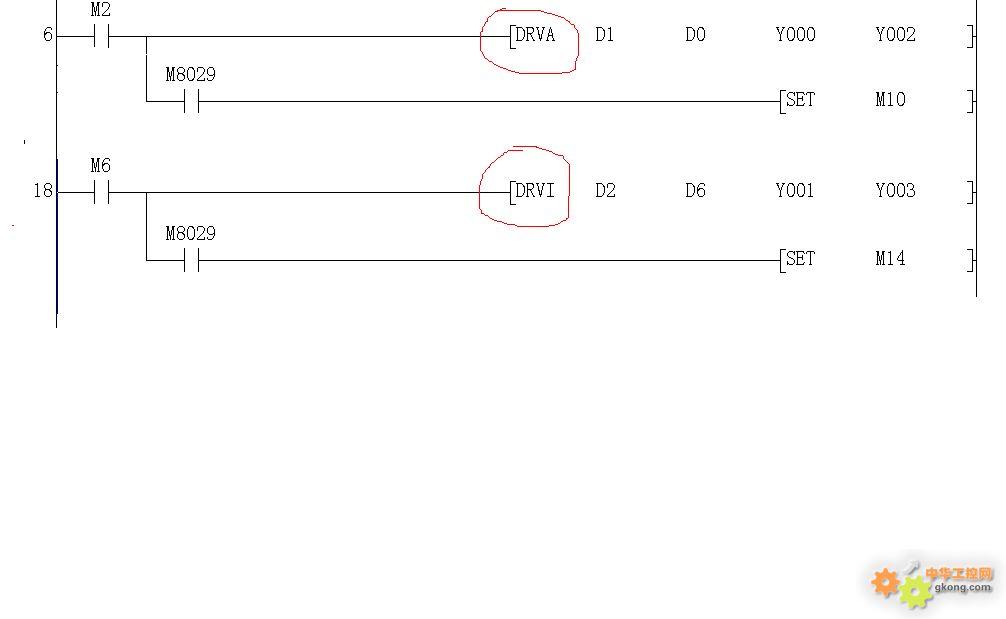
看编程手册没看明白DRVA与DRVI,在实际使用时。
有什么实质上的区别。希望使用过的朋友给解释解释。谢谢!![附件]()
有什么实质上的区别。希望使用过的朋友给解释解释。谢谢!