发表于:2010/1/4 8:28:53
#0楼
数控机床进给运动系统,尤其是轮廓控制的进给运动系统,必须对进给运动的位置和运动的速度两个方面同时实现自动控制,与普通机床相比,要求其进给系统有较高的定位精度和良好的动态响应特性。一个典型数控机床闭环控制的进给系统,通常由位置比较放大单元、驱动单元、机械传动装置及检测反馈元件等几部分组成。这里所说的机械传动装置是指将驱动源的旋转运动变为工作台直线运动的整个机械传动链,包括减速装置、转动变移动的丝杠螺母副及导向元件等等。为确保数控机床进给系统的传动精度、灵敏度和工作的稳定性,对机械部分设计总的要求是消除间隙,减少摩擦,减少运动惯量,提高传动精度和刚度。另外,进给系统的负载变化较大,响应特性要求很高,故对刚度、惯量匹配都有很高的要求。
为了满足上述要求,数控机床一般采用低摩擦的传动副,如减摩滑动导轨、滚动导轨及静压导轨、滚珠丝杠等;保证传动元件的加工精度,采用合理的预紧、合理的支承形式以提高传动系统的刚度;选用最佳降速比,以提高机床的分辨率,并使系统折算到驱动轴上的惯量减少;尽量消除传动间隙,减少反向死区误差,提高位移精度等。
一.电机与丝杠之间的联接
数控机床进给驱动对位置精度、快速响应特性、调速范围等有较高的要求。实现进给驱动的电机主要有三种:步进电机、直流伺服电机和交流伺服电机。目前,步进电机只适应用于经济型数控机床,直流伺服电机在我国正广泛使用,交流伺服电机作为比较理想的驱动元件已成为发展趋势。数控机床的进给系统当采用不同的驱动元件时,其进给机构可能会有所不同。电机与丝杠间的联接主要有三种形式:
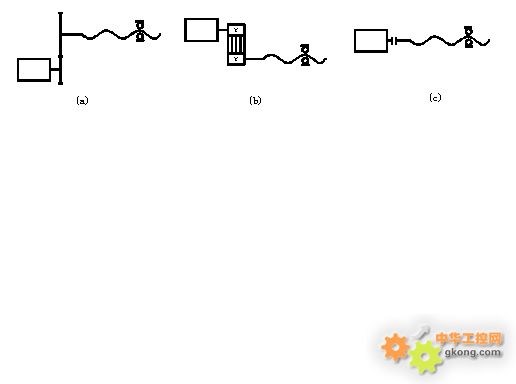
1.带有齿轮传动的进给运动
数控机床在机械进给装置中一般采用齿轮传动副来达到一定的降速比要求,如图所示。由于齿轮在制造中不可能达到理想齿面要求,总存在着一定的齿侧间隙才能正常工作,但齿侧间隙会造成进给系统的反向失动量,对闭环系统来说,齿侧间隙会影响系统的稳定性。因此,齿轮传动副常采用消除措施来尽量减小齿轮侧隙。但这种联接形式的机械结构比较复杂。
![附件]() 2.经同步带轮传动的进给运动
2.经同步带轮传动的进给运动
如图b)所示,这种联接形式的机械结构比较简单。同步带传动综合了带传动和链传动的优点,可以避免齿轮传动时引起的振动和噪声,但只能适于低扭矩特性要求的场所。安装时中心距要求严格,且同步带与带轮的制造工艺复杂。
3.电机通过联轴器直接与丝杠联接
如图c)所示,此结构通常是电机轴与丝杠之间采用锥环无键联接或高精度十字联轴器联接,从而使进给传动系统具有较高的传动精度和传动刚度,并大大简化了机械结构。在加工中心和精度较高的数控机床的进给运动中,普遍采用这种联接形式。
为了满足上述要求,数控机床一般采用低摩擦的传动副,如减摩滑动导轨、滚动导轨及静压导轨、滚珠丝杠等;保证传动元件的加工精度,采用合理的预紧、合理的支承形式以提高传动系统的刚度;选用最佳降速比,以提高机床的分辨率,并使系统折算到驱动轴上的惯量减少;尽量消除传动间隙,减少反向死区误差,提高位移精度等。
一.电机与丝杠之间的联接
数控机床进给驱动对位置精度、快速响应特性、调速范围等有较高的要求。实现进给驱动的电机主要有三种:步进电机、直流伺服电机和交流伺服电机。目前,步进电机只适应用于经济型数控机床,直流伺服电机在我国正广泛使用,交流伺服电机作为比较理想的驱动元件已成为发展趋势。数控机床的进给系统当采用不同的驱动元件时,其进给机构可能会有所不同。电机与丝杠间的联接主要有三种形式:
1.带有齿轮传动的进给运动
数控机床在机械进给装置中一般采用齿轮传动副来达到一定的降速比要求,如图所示。由于齿轮在制造中不可能达到理想齿面要求,总存在着一定的齿侧间隙才能正常工作,但齿侧间隙会造成进给系统的反向失动量,对闭环系统来说,齿侧间隙会影响系统的稳定性。因此,齿轮传动副常采用消除措施来尽量减小齿轮侧隙。但这种联接形式的机械结构比较复杂。
如图b)所示,这种联接形式的机械结构比较简单。同步带传动综合了带传动和链传动的优点,可以避免齿轮传动时引起的振动和噪声,但只能适于低扭矩特性要求的场所。安装时中心距要求严格,且同步带与带轮的制造工艺复杂。
3.电机通过联轴器直接与丝杠联接
如图c)所示,此结构通常是电机轴与丝杠之间采用锥环无键联接或高精度十字联轴器联接,从而使进给传动系统具有较高的传动精度和传动刚度,并大大简化了机械结构。在加工中心和精度较高的数控机床的进给运动中,普遍采用这种联接形式。