














发表于:2009/6/9 19:00:40
#0楼
本试验是个测试转向器各项性能的试验,要求把各传感器测得的数值通过显示屏表现出来。原理如下图:
![附件]()
图3.5 程序控制原理图
以下是程序设计:
MOD: PUSH ACC
PUSH DPH
PUSH DPL
SETB RS0
MOV R0,#CWR
MOV A,#4DH
MOVX @R0,A
DIR: MOV R0,#DIS5
MOV R6,#20H
MOV R7,#00H
MOV DPTR,#TAB
DIR1: MOV A,#00H
MOV R1,#POC
MOVX @R1,A
MOVX A,@R0
MOVC A,@A+DPTR
MOV R1,#POB
MOVX @R1,A
MOV A,R6
MOV R1,#POA
MOV @R1,A
HERE: DJNZ R7,HERE
INC R0
CLR C
MOV A,R6
RRC A
MOV R6,A
JNZ DIR1
CLR RS0
POP DPL
POP DPH
POP ACC
TAB: DB 3FH,06,5BH,4FH,66H,6DH,7DH,07
DB 7FH,6FH,77H,7CH,39H,5EH,79H,71H
KEY: LCALL KS
JNZ K1
LCALL DELAY
LJMP KEY
K1: LCALL DELAY
LCALL DELAY
LCALL KS
JNZ K2
LJMP KEY
K2: MOV R2,#0FEH
MOV R4,#00H
LK: ADD A,R4
PUSH ACC
NEXT: INC R4
MOV A,R2
JNB ACC.7,KEY
RL A
MOV R2,A
LJMP K3
RS: MOV DPTR,#PA
MOV A,#00H
MOVX @DPTR,A
INC DPTR
INC DPTR
MOVX A,@DPTR
CPL A
ANL A,#0FH
帮我解释一下 说下原理 小弟在这表示感谢啦
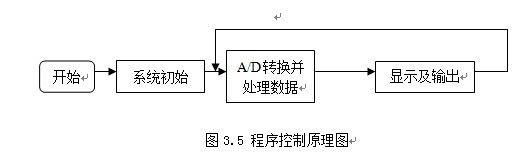
图3.5 程序控制原理图
以下是程序设计:
MOD: PUSH ACC
PUSH DPH
PUSH DPL
SETB RS0
MOV R0,#CWR
MOV A,#4DH
MOVX @R0,A
DIR: MOV R0,#DIS5
MOV R6,#20H
MOV R7,#00H
MOV DPTR,#TAB
DIR1: MOV A,#00H
MOV R1,#POC
MOVX @R1,A
MOVX A,@R0
MOVC A,@A+DPTR
MOV R1,#POB
MOVX @R1,A
MOV A,R6
MOV R1,#POA
MOV @R1,A
HERE: DJNZ R7,HERE
INC R0
CLR C
MOV A,R6
RRC A
MOV R6,A
JNZ DIR1
CLR RS0
POP DPL
POP DPH
POP ACC
TAB: DB 3FH,06,5BH,4FH,66H,6DH,7DH,07
DB 7FH,6FH,77H,7CH,39H,5EH,79H,71H
KEY: LCALL KS
JNZ K1
LCALL DELAY
LJMP KEY
K1: LCALL DELAY
LCALL DELAY
LCALL KS
JNZ K2
LJMP KEY
K2: MOV R2,#0FEH
MOV R4,#00H
LK: ADD A,R4
PUSH ACC
NEXT: INC R4
MOV A,R2
JNB ACC.7,KEY
RL A
MOV R2,A
LJMP K3
RS: MOV DPTR,#PA
MOV A,#00H
MOVX @DPTR,A
INC DPTR
INC DPTR
MOVX A,@DPTR
CPL A
ANL A,#0FH
帮我解释一下 说下原理 小弟在这表示感谢啦
[此贴子已经被作者于2009-6-9 19:01:36编辑过]
