














发表于:2008/5/7 18:48:00
#0楼
工业机器人的腰部问题
本人设计是焊接机器人,在设计motoman工业机器人的腰部问题上遇到点问题,我的设计方案是这样的,首先选择伺服电机,然后输出轴接到联轴器再到谐波减速器,从谐波减速器的直接连接腰部的旋转运动,因为考虑到扭矩比较大,我现在打算装上交叉滚子轴承,但是不知道怎么安装,希望大家能给我说说实际的机器人腰部的设计问题。
问题补充:在实际生产中的焊机机器人腰部的旋转传动运动是怎么样的?
希望大家加我QQ 86741842 本人经常在线。
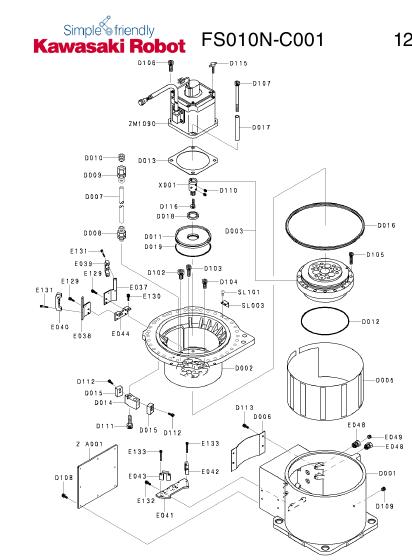
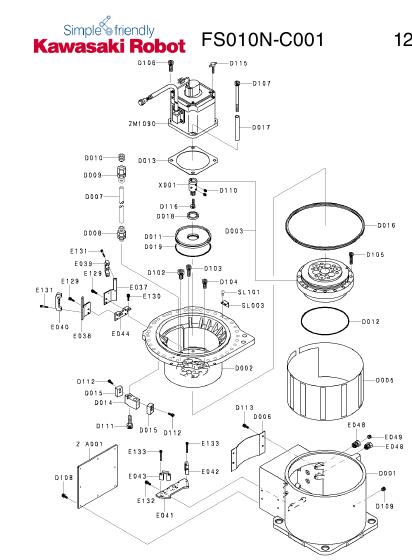
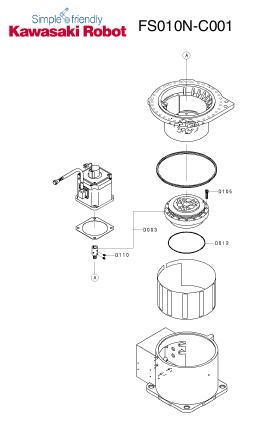
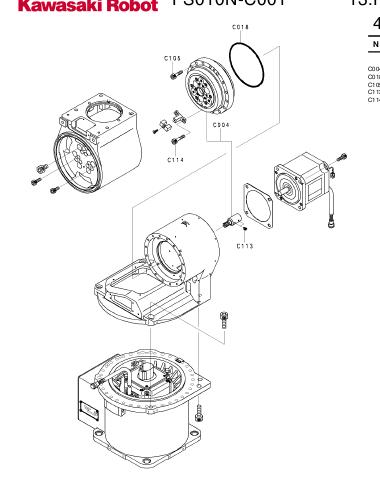
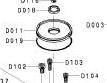
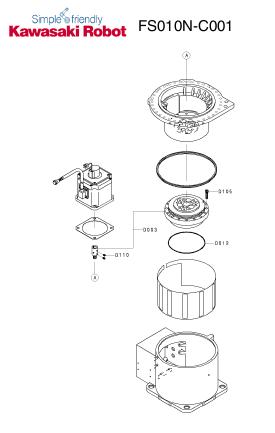
我是按照这几张图设计的,但是有些地方看不明白,比如交叉滚子轴承的安装,还有第一张图的零件D019 和DO18是什么呢,希望大家加我QQ一起讨论!86741842 谢谢大家
![附件]()
![附件]()
![附件]()
![附件]()
![附件]()
![附件]()
本人设计是焊接机器人,在设计motoman工业机器人的腰部问题上遇到点问题,我的设计方案是这样的,首先选择伺服电机,然后输出轴接到联轴器再到谐波减速器,从谐波减速器的直接连接腰部的旋转运动,因为考虑到扭矩比较大,我现在打算装上交叉滚子轴承,但是不知道怎么安装,希望大家能给我说说实际的机器人腰部的设计问题。
问题补充:在实际生产中的焊机机器人腰部的旋转传动运动是怎么样的?
希望大家加我QQ 86741842 本人经常在线。
我是按照这几张图设计的,但是有些地方看不明白,比如交叉滚子轴承的安装,还有第一张图的零件D019 和DO18是什么呢,希望大家加我QQ一起讨论!86741842 谢谢大家
[此贴子已经被作者于2008-5-7 18:50:19编辑过]
