发表于:2007/2/1 17:18:00
#0楼
感应电机是利用电磁感应原理,通过定子的三相电流产生旋转磁场,并与转子绕组中的感应电流相互作用产生电磁转矩,以进行能量转换。正常情况下,感应电机的转子转速总是略低或略高于旋转磁场的转速(同步转速),因此感应电机又称为“异步电机”。旋转磁场的转速ns与转子转速n之差称为转差.转差Δn与同步转速ns的比值称为转差率,用s表示,即:
(5—1)
转差率是表征感应电机运行状态的一个基本变量。
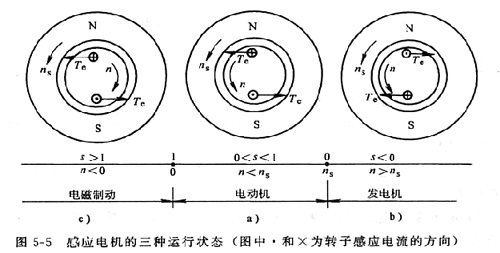
当感应电机的负载发生变化时,转子的转速和转差率将随之而变化,使转子 导体中的电动势、电流和电磁转矩发生相应的变化,以适应负载的需要。按照转 差率的正负和大小,感应电机有电动机、发电机和电磁制动三种运行状态,如图 5-5所示。
当转子转速低于旋转磁场的转速时(ns>n>0),转差率0<s<l。设定子 三相电流所产生的气隙旋转磁场为逆时针转向,按右手定则.即可确定转子导体 “切割”气隙磁场后感应电动势的方向,如图5—5a所示。由于转子绕组是短路的,转子导体中便有电流流过。转子感应电流与气隙磁场相互作用,将产生电磁力和电磁转矩;按左手定则,电磁转矩的方向与转子转向相同,即电磁转矩为驱动性质的转矩(图5—5a)。此时电机从电网输入功率,通过电磁感应,由转子输出机械功率,电机处于电动机状态。
若电机用原动机驱动,使转子转速高于旋转磁场转速(n> ns),则转差率s<0。此时转子导体中的感应电动势以及电流的有功分量将与电动机状态时相反,因此电磁转矩的方向将与旋转磁场和转子转向两者相反,如图5—5b所示,即电磁转矩为制动性质的转矩。为使转子持续地以高于旋转磁场的转速旋转.原动机的驱动转矩必须克服制动的电磁转矩;此时转子从原动机输入机械功率,通过电磁感应由定于输出电功率,电机处于发电机状态。
若由机械或其他外因使转子逆着旋转磁场方向旋转(n<0),则转差率s>1。此时转子导体“切割”气隙磁场的相对速度方向与电动机状态时相同,故转子导体中的感应电动势和电流的有功分量与电动机状态时同方向,如图5—5c所示,电磁转矩方向亦与图5—5a中相同。但由于转子转向改变,故对转子而言,此电磁转矩表现为制动转矩。此时电机处于电磁制动状态,它一方面从外界输入机械功率,同时又从电网吸取电功率,两者都变成电机内部的损耗。

![附件]()
(5—1)
转差率是表征感应电机运行状态的一个基本变量。
当感应电机的负载发生变化时,转子的转速和转差率将随之而变化,使转子 导体中的电动势、电流和电磁转矩发生相应的变化,以适应负载的需要。按照转 差率的正负和大小,感应电机有电动机、发电机和电磁制动三种运行状态,如图 5-5所示。
当转子转速低于旋转磁场的转速时(ns>n>0),转差率0<s<l。设定子 三相电流所产生的气隙旋转磁场为逆时针转向,按右手定则.即可确定转子导体 “切割”气隙磁场后感应电动势的方向,如图5—5a所示。由于转子绕组是短路的,转子导体中便有电流流过。转子感应电流与气隙磁场相互作用,将产生电磁力和电磁转矩;按左手定则,电磁转矩的方向与转子转向相同,即电磁转矩为驱动性质的转矩(图5—5a)。此时电机从电网输入功率,通过电磁感应,由转子输出机械功率,电机处于电动机状态。
若电机用原动机驱动,使转子转速高于旋转磁场转速(n> ns),则转差率s<0。此时转子导体中的感应电动势以及电流的有功分量将与电动机状态时相反,因此电磁转矩的方向将与旋转磁场和转子转向两者相反,如图5—5b所示,即电磁转矩为制动性质的转矩。为使转子持续地以高于旋转磁场的转速旋转.原动机的驱动转矩必须克服制动的电磁转矩;此时转子从原动机输入机械功率,通过电磁感应由定于输出电功率,电机处于发电机状态。
若由机械或其他外因使转子逆着旋转磁场方向旋转(n<0),则转差率s>1。此时转子导体“切割”气隙磁场的相对速度方向与电动机状态时相同,故转子导体中的感应电动势和电流的有功分量与电动机状态时同方向,如图5—5c所示,电磁转矩方向亦与图5—5a中相同。但由于转子转向改变,故对转子而言,此电磁转矩表现为制动转矩。此时电机处于电磁制动状态,它一方面从外界输入机械功率,同时又从电网吸取电功率,两者都变成电机内部的损耗。