














发表于:2023/12/25 11:52:30
#0楼
我们知道,RS485 物理层是半双工,即便总线上只有两个节点,譬如一台 PC 和一个设备,设备也不能主动发数据给 PC,因为可能会和 PC 下发的数据冲突。
这也是为什么 RS232 始终不能被 RS485 所取代的主要原因,除了不能全双工,其它方面 RS485 都要比 RS232 优秀很多,譬如更远的距离、更高的速度、可以连接更多节点、更加抗干扰。
然而,现在可以通过这个小芯片,在半双工的 RS485 总线上,为任意两两节点之间,虚拟出全双工专线。
譬如总线上有 A B C D 四个节点,A B 之间可以随意互发数据,C D 之间也可以,A C 之间也可以,不会出现数据冲突的问题。
而且支持组播通讯:A 同时发数据给 C 和 D. 以及支持广播:譬如 A 同时发送数据给 B C D, 然后 B C D 还可以同时回复数据给 A.
![附件 cdctl01a.jpg]()
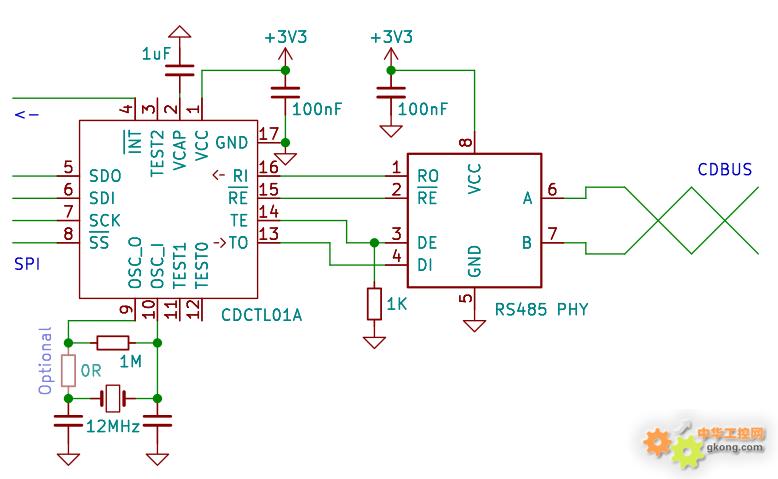
芯片的原理其实很简单,它是一个 SPI 转 UART 控制器,UART 端是有指定的数据包格式的(原地址、目标地址、数据长度共 3 字节头 + 用户数据 + 2 字节 CRC 结尾),芯片 UART 口可连接 RS485 接口芯片,控制 RS485 的收发,SPI 口则连接用户 MCU。
![附件 072708qdkafn1xbk1i4pnq.jpg]()
此 UART 控制器引入了 CAN 总线的仲裁功能,只不过收发是按照标准的串口 8N1 格式(一个启始位,8 个数据位,一个停止位,无校验位)。
在 RS485 上进行收发的时候,会通过包头第一个字节进行仲裁(第一个字节是发送方的地址),按位回读进行非破坏性仲裁,让优先级最高的节点优先使用总线,而低优先级的节点,数据会延后自动重传。
发送首字节时 RS485 是半驱输出,因为回读有延迟,速率建议不超过 1Mbps。
由于 RS485 支持全驱输出,所以从第二个字节开始,可以用更高的传输速率,此芯片速率可以达到 50Mbps(类似 CAN FD 的双速率,但由于 CAN FD 的高速部分依然是半驱输出,所以速率比较受限)。
在需要兼容传统串口的场合,使用仲裁模式时,需要让高速部分的速率和低速部分保持相同。
此芯片同时还支持另一种模式,可以全程使用高速波特率,同样可以把 RS485 当全双工使用 - Break Sync 模式。
原理也不复杂,总线空闲一段时间后,若某个节点想发送数据,需要先发送一个 break 字符(连续 10 个 bit 为 0 的特殊串口字符)。
break 字符在这里的功能是让总线退出空闲状态,而且若有多个节点同时发送 break 字符,也不会有不良影响。
等总线重新进入空闲后,每个节点等待不同的时间发送数据,优先级越高的节点等待的时间越短。由于各节点等待时间不同,所以不会发生数据冲突。
此模式适合节点数相对较少的总线,节点数多了,最大等待时间就会变长,影响效率。
除了以上两种对等通讯模式,还支持传统全双工和传统半双工模式,可以当作普通的串口扩展芯片使用。
芯片源码和细节说明:https://cdbus.org (中文版可参见附件中文数据手册)
CDBUS 的 IP 核 FPGA 用户可以免费商用。
芯片手册:
相关的开源项目摘选:
半自动桌面视觉贴片机 CDPNP: https://github.com/dukelec/cdpnp
(开源贴片机视频: https://www.bilibili.com/video/BV1cj411Y7qQ/ )
CDFOC 无刷电机 FOC 控制器: https://github.com/dukelec/cdfoc
CDSTEP 步进电机控制器: https://github.com/dukelec/cdstep
CDCAM 串口摄像头: https://github.com/dukelec/cdcam
CDBUS-BRIDGE(USB 转高速 RS485): https://github.com/dukelec/cdbus_bridge
CDBUS-GUI 开源串口上位机,支持参数配置、波形显示、IAP 升级: https://github.com/dukelec/cdbus_gui
![附件 Screenshot_2023-12-25_11-13-46.jpg]()
这也是为什么 RS232 始终不能被 RS485 所取代的主要原因,除了不能全双工,其它方面 RS485 都要比 RS232 优秀很多,譬如更远的距离、更高的速度、可以连接更多节点、更加抗干扰。
然而,现在可以通过这个小芯片,在半双工的 RS485 总线上,为任意两两节点之间,虚拟出全双工专线。
譬如总线上有 A B C D 四个节点,A B 之间可以随意互发数据,C D 之间也可以,A C 之间也可以,不会出现数据冲突的问题。
而且支持组播通讯:A 同时发数据给 C 和 D. 以及支持广播:譬如 A 同时发送数据给 B C D, 然后 B C D 还可以同时回复数据给 A.
芯片的原理其实很简单,它是一个 SPI 转 UART 控制器,UART 端是有指定的数据包格式的(原地址、目标地址、数据长度共 3 字节头 + 用户数据 + 2 字节 CRC 结尾),芯片 UART 口可连接 RS485 接口芯片,控制 RS485 的收发,SPI 口则连接用户 MCU。
此 UART 控制器引入了 CAN 总线的仲裁功能,只不过收发是按照标准的串口 8N1 格式(一个启始位,8 个数据位,一个停止位,无校验位)。
在 RS485 上进行收发的时候,会通过包头第一个字节进行仲裁(第一个字节是发送方的地址),按位回读进行非破坏性仲裁,让优先级最高的节点优先使用总线,而低优先级的节点,数据会延后自动重传。
发送首字节时 RS485 是半驱输出,因为回读有延迟,速率建议不超过 1Mbps。
由于 RS485 支持全驱输出,所以从第二个字节开始,可以用更高的传输速率,此芯片速率可以达到 50Mbps(类似 CAN FD 的双速率,但由于 CAN FD 的高速部分依然是半驱输出,所以速率比较受限)。
在需要兼容传统串口的场合,使用仲裁模式时,需要让高速部分的速率和低速部分保持相同。
此芯片同时还支持另一种模式,可以全程使用高速波特率,同样可以把 RS485 当全双工使用 - Break Sync 模式。
原理也不复杂,总线空闲一段时间后,若某个节点想发送数据,需要先发送一个 break 字符(连续 10 个 bit 为 0 的特殊串口字符)。
break 字符在这里的功能是让总线退出空闲状态,而且若有多个节点同时发送 break 字符,也不会有不良影响。
等总线重新进入空闲后,每个节点等待不同的时间发送数据,优先级越高的节点等待的时间越短。由于各节点等待时间不同,所以不会发生数据冲突。
此模式适合节点数相对较少的总线,节点数多了,最大等待时间就会变长,影响效率。
除了以上两种对等通讯模式,还支持传统全双工和传统半双工模式,可以当作普通的串口扩展芯片使用。
芯片源码和细节说明:https://cdbus.org (中文版可参见附件中文数据手册)
CDBUS 的 IP 核 FPGA 用户可以免费商用。
芯片手册:
附件:
[本地下载]附件:
[本地下载]相关的开源项目摘选:
半自动桌面视觉贴片机 CDPNP: https://github.com/dukelec/cdpnp
(开源贴片机视频: https://www.bilibili.com/video/BV1cj411Y7qQ/ )
CDFOC 无刷电机 FOC 控制器: https://github.com/dukelec/cdfoc
CDSTEP 步进电机控制器: https://github.com/dukelec/cdstep
CDCAM 串口摄像头: https://github.com/dukelec/cdcam
CDBUS-BRIDGE(USB 转高速 RS485): https://github.com/dukelec/cdbus_bridge
CDBUS-GUI 开源串口上位机,支持参数配置、波形显示、IAP 升级: https://github.com/dukelec/cdbus_gui

[此贴子已经被作者于2023/12/26 15:46:16编辑过]


