














发表于:2023/10/26 11:40:31
#0楼
本节课程我们主要讲解一下正运动API函数封装原理以及自定义API封装例程。
正运动技术运动控制器均使用统一的API接口
![附件 000.jpg]()
所有的控制器和控制卡均使用同一套API函数,均支持C、C++、C#、LabVIEW、Python、Delphi等开发语言,支持VC6.0、VB6.0、Qt、.Net等平台,支持Windows、Linux、WinCE、iMac等操作系统。
各个开发语言都有各自所对应的函数库,所调用的API均一致,这大大提高了可移植性。各个开发语言库的调用方式可参考“ZMotion PC函数库编程手册 V2.1.1”。
文档参考路径:光盘资料\04PC函数\Zmotion PC函数库编程手册及例程源码。
![附件 1.jpg]()
以下为各个功能部分API指令一览表;
1、控制器连接
![附件 2.jpg]()
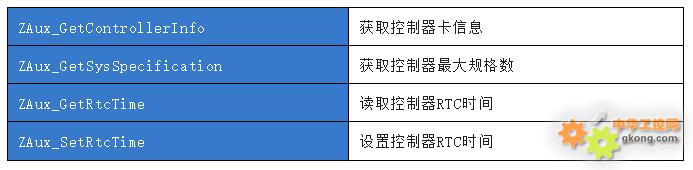
2、控制器信息获取
![附件 3.jpg]()
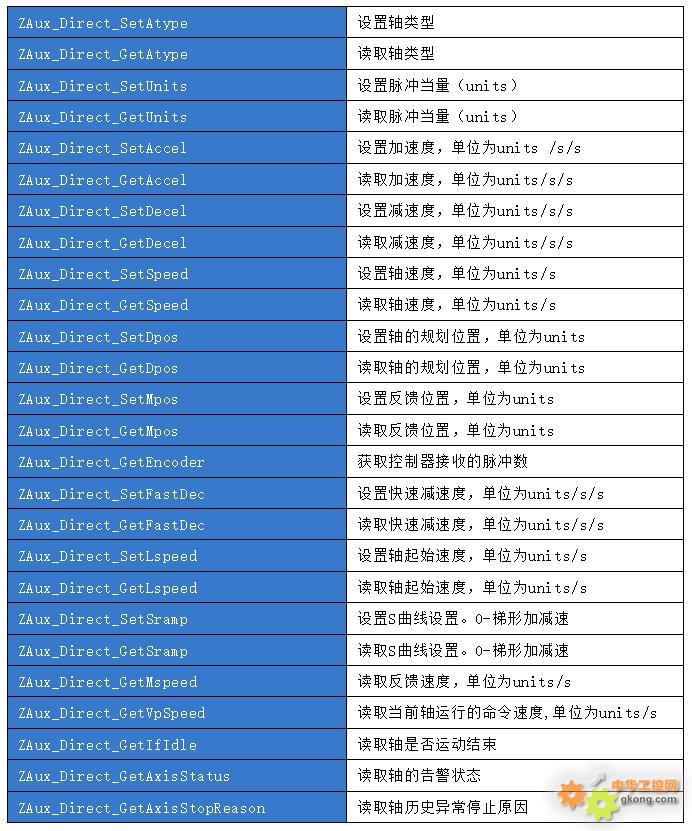
3、基本轴参数设置
![附件 4.jpg]()
4、基本运动控制
![附件 5.jpg]()
5、VR寄存器
![附件 6.jpg]()
6、Table寄存器
![附件 7.jpg]()
7、Modbus寄存器
![附件 8.jpg]()
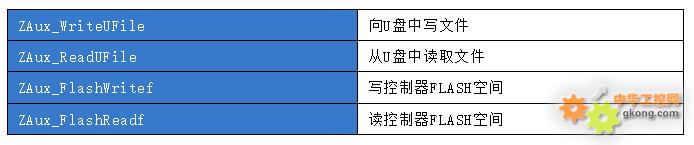
8、Flash/文件读写
![附件 9.jpg]()
更多API接口详情可以参考“ZMotion PC函数库编程手册 V2.1.1”。
![附件 企业微信截图_20231026113929.jpg]()
如果想了解更多内容,请点击全国产EtherCAT运动控制边缘控制器(二):统一的上位机API接口继续往下看更详细的内容。
正运动技术运动控制器均使用统一的API接口

所有的控制器和控制卡均使用同一套API函数,均支持C、C++、C#、LabVIEW、Python、Delphi等开发语言,支持VC6.0、VB6.0、Qt、.Net等平台,支持Windows、Linux、WinCE、iMac等操作系统。
各个开发语言都有各自所对应的函数库,所调用的API均一致,这大大提高了可移植性。各个开发语言库的调用方式可参考“ZMotion PC函数库编程手册 V2.1.1”。
文档参考路径:光盘资料\04PC函数\Zmotion PC函数库编程手册及例程源码。

以下为各个功能部分API指令一览表;
1、控制器连接

2、控制器信息获取
3、基本轴参数设置
4、基本运动控制

5、VR寄存器

6、Table寄存器

7、Modbus寄存器

8、Flash/文件读写
更多API接口详情可以参考“ZMotion PC函数库编程手册 V2.1.1”。
如果想了解更多内容,请点击全国产EtherCAT运动控制边缘控制器(二):统一的上位机API接口继续往下看更详细的内容。