














发表于:2022/12/16 10:05:00
#0楼
在线命令使用方法是通过正运动技术自主研发的ZDevelop软件内部的在线命令与输出窗口,进行输入需要查询与输出控制器的各种参数、控制轴运动、打印程序运行结果、打印程序错误等信息。
软件开发人员在程序中给出的打印输出函数(由?、PRINT、WARN、ERROR、TRACE等命令输出)。
?为PRINT的简写,WARN为警告信息,ERROR为错误信息,TRACE打印信息。
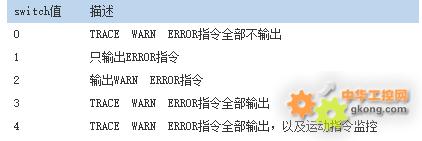
其中WARN、ERROR、TRACE等命令是否输出由ERRSWITCH指令控制。
语法:ERRSWITCH=switch
switch:调试输出的开关
![附件 企业微信截图_16711550622617.jpg]()
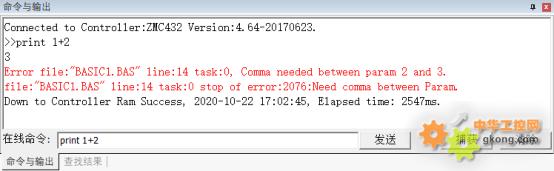
连接了控制器或仿真器就可以使用在线命令功能,不受程序运行状态的限制。“清除”按钮用以清空“命令与输出”窗口的所有内容。
![附件 2baceb6f47af47c6b4b730d24e7c0825.jpg]()
“捕获”开启后弹出“另存为”窗口,默认保存文件类型为txt文本文件,捕获开启后,原“捕获”按钮变为“捕获中”,将接下来命令与输出窗口输出的所有内容保存到txt文本文件里,直到再次按下“捕获中”按钮停止捕获保存信息。
![附件 49227bf7bccd4ed4a093a81aa808dfdd.jpg]()
除了发送指令语法之外,常用的打印查看命令有:
?*SET:打印所有参数值
?*TASK:打印任务信息,任务正常时只打印任务状态,任务出错时还会打印出错误任务号,具体错误行
?*MAX:打印所有规格参数
?*FILE:打印程序文件信息
?*SETCOM:打印当前串口的配置信息
?*BASE:打印当前任务的BASE列表(140123以后版本支持)
?*数组名:打印数组的所有元素,数组长度不能太长
?*参数名:打印一个所有轴的单个参数
?*ETHERCAT:打印EtherCAT总线连接设置状态
?*RTEX:打印RTEX总线连接设置状态
?*FRAME:打印机械手参数,需要161022及以上固件支持
?*SLOT:打印出控制器槽位口信息(RTEX口,EtherCAT口)
?*PORT:打印所有PORT通讯口
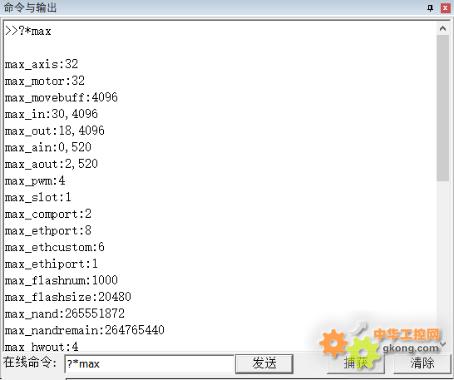
例如:?*MAX打印所有规格参数结果,不同型号的的控制器硬件规格是不同的,以下打印信息仅供参考。
![附件 ace36b7159754846872ec6061b4d280f.jpg]()
max_axis:32 所有轴的最大轴数
max_motor:32 可控的最大电机轴数
max_movebuff:4096 每个轴或者轴组的最大运动缓冲
max_in:30,4096 控制器自带IN输入个数,最多支持IN输入个数
max_out:18,4096 控制器自带OUT输出个数,最多支持OUT输出个数
max_ain:0,520 控制器自带模拟量输入个数,最多支持模拟量输入个数
max_aout:2,520 控制器自带模拟量输出个数,最多支持模拟量输出个数
max_pwm:4 PWM输出个数
max_slot:1 总线个数
max_comport:2 串口个数
max_ethport:8 与PC、API函数的网口通讯连接个数
max_ethcustom:6 自定义网口通讯的连接个数
max_ethiport:1 正运动控制器互联互通的网口通讯连接
max_flashnum:1000 FLASH块数
max_flashsize:20480 每个FLASH空间大小
max_nand:265551872 NandFlash存储总共的数量空间
max_nandremain:264765440 NandFlash存储剩余可用的数量空间
max_hwout:4 硬件位置比较输出口的个数
max_pswitch:16 软件位置比较输出的最多个数
max_file:61 系统最多支持的文件数
max_3file:2 系统最多支持的同时运行三次文件数
max_task:22 任务数
max_timer:1024 定时器个数
max_loopnest:8 内部循环或者选择的次数
max_callstack:8 子程序调用的堆栈层数
max_local of one sub:16 SUB的局部变量数
max_vr:8000 VR寄存器空间个数
max_table:320000 TABLE数组空间个数
max_modbusbit:8000 MODBUS_BIT位寄存器空间大小
max_modbusreg:8000 MODBUS_REG字寄存器空间大小
max_var:4096 最多支持变量个数(含全局变量与文件变量)
max_array:1024 最多支持数组个数(含全局数组与文件数组)
max_arrayspace:2560000 所有数组总共的空间大小
max_sub:1500 最多支持SUB子程序的个数
max_edgescan:1024 最多可支持的上升沿/下降沿扫描个数
max_lablelength:21 数组与变量等自定义字符的最大长度
max_hmi:1,x:1024 y:800 支持1个远端HMI,最大尺寸为1024*800
function support:Coder Cam MultiMove Circ Merge Frame 支持的运动控制功能
软件开发人员在程序中给出的打印输出函数(由?、PRINT、WARN、ERROR、TRACE等命令输出)。
?为PRINT的简写,WARN为警告信息,ERROR为错误信息,TRACE打印信息。
其中WARN、ERROR、TRACE等命令是否输出由ERRSWITCH指令控制。
语法:ERRSWITCH=switch
switch:调试输出的开关
连接了控制器或仿真器就可以使用在线命令功能,不受程序运行状态的限制。“清除”按钮用以清空“命令与输出”窗口的所有内容。
“捕获”开启后弹出“另存为”窗口,默认保存文件类型为txt文本文件,捕获开启后,原“捕获”按钮变为“捕获中”,将接下来命令与输出窗口输出的所有内容保存到txt文本文件里,直到再次按下“捕获中”按钮停止捕获保存信息。

除了发送指令语法之外,常用的打印查看命令有:
?*SET:打印所有参数值
?*TASK:打印任务信息,任务正常时只打印任务状态,任务出错时还会打印出错误任务号,具体错误行
?*MAX:打印所有规格参数
?*FILE:打印程序文件信息
?*SETCOM:打印当前串口的配置信息
?*BASE:打印当前任务的BASE列表(140123以后版本支持)
?*数组名:打印数组的所有元素,数组长度不能太长
?*参数名:打印一个所有轴的单个参数
?*ETHERCAT:打印EtherCAT总线连接设置状态
?*RTEX:打印RTEX总线连接设置状态
?*FRAME:打印机械手参数,需要161022及以上固件支持
?*SLOT:打印出控制器槽位口信息(RTEX口,EtherCAT口)
?*PORT:打印所有PORT通讯口
例如:?*MAX打印所有规格参数结果,不同型号的的控制器硬件规格是不同的,以下打印信息仅供参考。
max_axis:32 所有轴的最大轴数
max_motor:32 可控的最大电机轴数
max_movebuff:4096 每个轴或者轴组的最大运动缓冲
max_in:30,4096 控制器自带IN输入个数,最多支持IN输入个数
max_out:18,4096 控制器自带OUT输出个数,最多支持OUT输出个数
max_ain:0,520 控制器自带模拟量输入个数,最多支持模拟量输入个数
max_aout:2,520 控制器自带模拟量输出个数,最多支持模拟量输出个数
max_pwm:4 PWM输出个数
max_slot:1 总线个数
max_comport:2 串口个数
max_ethport:8 与PC、API函数的网口通讯连接个数
max_ethcustom:6 自定义网口通讯的连接个数
max_ethiport:1 正运动控制器互联互通的网口通讯连接
max_flashnum:1000 FLASH块数
max_flashsize:20480 每个FLASH空间大小
max_nand:265551872 NandFlash存储总共的数量空间
max_nandremain:264765440 NandFlash存储剩余可用的数量空间
max_hwout:4 硬件位置比较输出口的个数
max_pswitch:16 软件位置比较输出的最多个数
max_file:61 系统最多支持的文件数
max_3file:2 系统最多支持的同时运行三次文件数
max_task:22 任务数
max_timer:1024 定时器个数
max_loopnest:8 内部循环或者选择的次数
max_callstack:8 子程序调用的堆栈层数
max_local of one sub:16 SUB的局部变量数
max_vr:8000 VR寄存器空间个数
max_table:320000 TABLE数组空间个数
max_modbusbit:8000 MODBUS_BIT位寄存器空间大小
max_modbusreg:8000 MODBUS_REG字寄存器空间大小
max_var:4096 最多支持变量个数(含全局变量与文件变量)
max_array:1024 最多支持数组个数(含全局数组与文件数组)
max_arrayspace:2560000 所有数组总共的空间大小
max_sub:1500 最多支持SUB子程序的个数
max_edgescan:1024 最多可支持的上升沿/下降沿扫描个数
max_lablelength:21 数组与变量等自定义字符的最大长度
max_hmi:1,x:1024 y:800 支持1个远端HMI,最大尺寸为1024*800
function support:Coder Cam MultiMove Circ Merge Frame 支持的运动控制功能