














发表于:2024/11/4 11:07:46
#0楼
DELTA并联机械手是由三个相同的支链所组成,每个支链包含一个转动关节和一个移动关节,具有结构紧凑、占地面积小、高速高灵活性等特点,可在有限的空间内进行高效的作业,广泛应用于柔性上下料、包装、分拣、装配等需要快速重复操作的领域。
DELTA并联机械手结合柔性振动盘、视觉定位系统,能够高效地完成对各种物料的无损、柔性上下料操作,可提高生产效率,满足了小批量、多品类生产的需求。
![附件 1.jpg]()
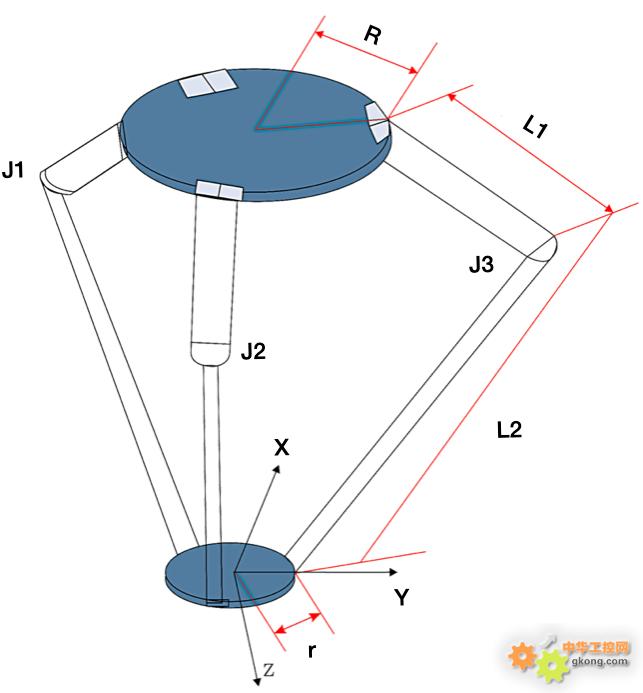
DELTA并联机械手工作原理:
DELTA并联机械手的工作原理是基于并联结构学和运动学原理,通过精确控制每个分支的运动,实现末端执行器的快速、准确稳定的运动。控制方式通常采用运动控制器和伺服电机,通过实时计算和调整每个分支的运动轨迹,实现所需的工作效果。
![附件 2.jpg]()
想了解即插即用DELTA并联机械手视觉上下料一站式解决方案,克服传统供料方式的局限,实现了快速物料切换和配置工艺,立即探索→点击【机器视觉运动控制一体机在DELTA并联机械手视觉上下料应用】,深入了解方案细节!
DELTA并联机械手结合柔性振动盘、视觉定位系统,能够高效地完成对各种物料的无损、柔性上下料操作,可提高生产效率,满足了小批量、多品类生产的需求。

DELTA并联机械手工作原理:
DELTA并联机械手的工作原理是基于并联结构学和运动学原理,通过精确控制每个分支的运动,实现末端执行器的快速、准确稳定的运动。控制方式通常采用运动控制器和伺服电机,通过实时计算和调整每个分支的运动轨迹,实现所需的工作效果。
想了解即插即用DELTA并联机械手视觉上下料一站式解决方案,克服传统供料方式的局限,实现了快速物料切换和配置工艺,立即探索→点击【机器视觉运动控制一体机在DELTA并联机械手视觉上下料应用】,深入了解方案细节!
