第五篇:双闭环调速系统的工作原理
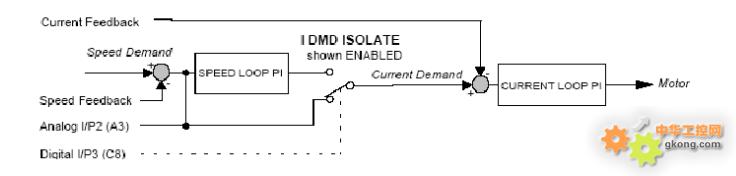
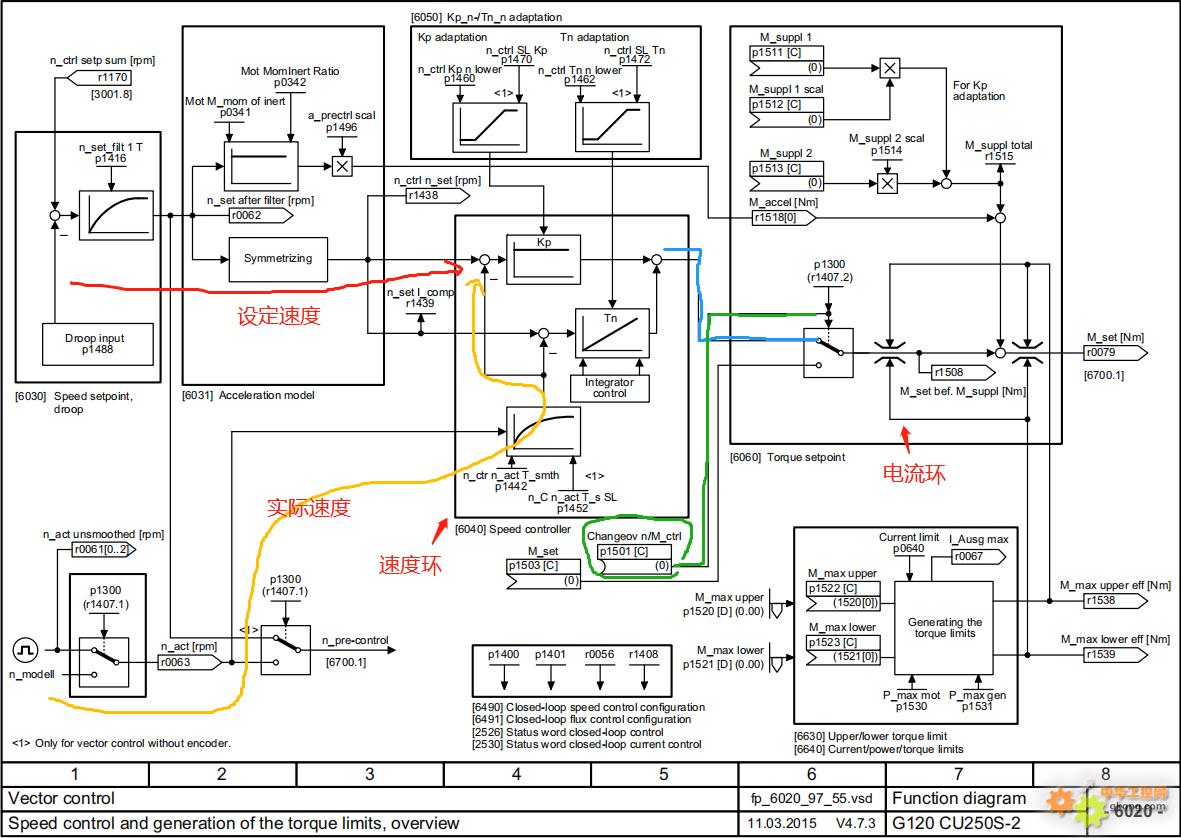
我记录这些力求浅显易懂,不照本宣科。对双闭环调速系统,很多朋友可能在学习这里时搞不懂内外环是怎么个工作的。如上篇的图片所示,内环是电流环,外环是速度环。驱动器正常工作时,内环跟随外环,一旦外环即速度环饱和,内环开始主控。
那么怎么理解速度环饱和呢?
为了消除速度环与电流环的静差,设计了两个PID调节器,如速度环PID调节器,当用户给定速度,那么速度环运行时与反馈速度进行比较,通过PID调节器输出来加速或者减速从而达到用户的设定值。
假如用户给定了500转,调速器实际反馈速度只有0转,速度环PID调节器开始输出一个增益值,并且此值将不断的累积,使电机不断加速,假定此时PID调节器积分输出达到最大值,调速器实际反馈速度只有350转,一直达不到用户给定值,此时就是饱和状态,由于速度环饱和,电流环开始主控调节。
由于积分的累积,速度一直在没达到500转时,整个调节器处于饱和状态,即速度环输出一直很大,退不下来,那么什么时候退饱和呢,当速度超过500转比如501转时,由于反向的信号让速度环退出饱和状态,此时速度环开始起作用。
或者可以分析电机的启动过程,当电机刚开始启动时,电机由于克服静转矩和启动转矩,此时达不到用户的设定值,速度环的输出饱和,电流环起作用,开始控制电机启动,由于电机加速,电流从启动电流降至正常的工作电流,速度继续上升,速度环开始退饱和,速度调节器开始调节速度。
双闭环调速系统的原理,总结一句话就是,速度环和电流环两个PID同时调节电机的速度和电流,当外环(速度环)起作用时,内环(电流环)跟随。当外环饱和时,内环主控。
这里最难理解的是“饱和”两个字。
打个不恰当的比喻,外环是小明,内环是张三,他们两个一起组队跑步比赛,小时负责速度跑至目标,张三负责跟随,补充两个人的体能,结果小明发现不管怎么使劲,发出全身的爆发力,也跑不上目标,这个时候他就达到了饱和状态,张三此时就全盘负责控制体能,不能过度消耗,维持一定的力量。后面小明追上了目标,不需要使上全部的力气了,这个时候他就不是饱和状态了,张三就不用操心那么多了,只是跟随小明继续就行了。
外环负责调速的精度,消除偏差;而内环负责限制电流,当电机过载或者堵转时,起快速的保护作用,一旦故障消失,系统立即恢复正常。
可以说双闭环调速系统是当今自动控制系统的不可缺少的驱动控制基础,即使是伺服驱动器也是在双闭环调速系统的基础上再建立一个位置环,理论仍然一脉相承。

















 感谢分享
感谢分享