发表于:2018/9/11 11:16:11
#10楼
以下是引用fumz78在2018/9/7 7:59:32的发言:
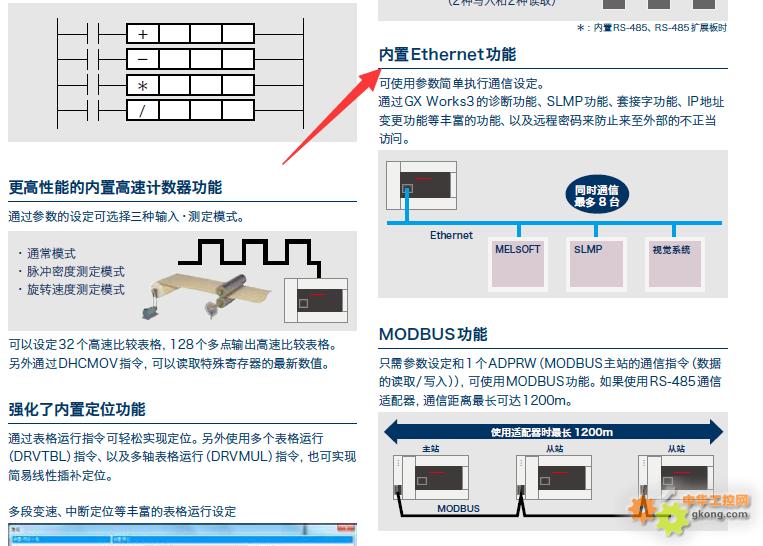
现在出来的FX5U自带以太网接口,支持CC-Link IE Field Basic网络通讯,可以连接三菱MR-JE-C伺服。
现在出来的FX5U自带以太网接口,支持CC-Link IE Field Basic网络通讯,可以连接三菱MR-JE-C伺服。
没有看到样本里写内置CCLINK功能啊
[此贴子已经被作者于2018/9/11 11:16:54编辑过]