发表于:2014/5/28 19:50:15
#0楼
跟风公司一个专做电子的小伙子,俺不服老,比他后上手、先调了出来。假借给俺儿子做玩具,其实是自己爽了一把,呵呵。
USB编程线
![附件 6.jpg]() 以下是小车
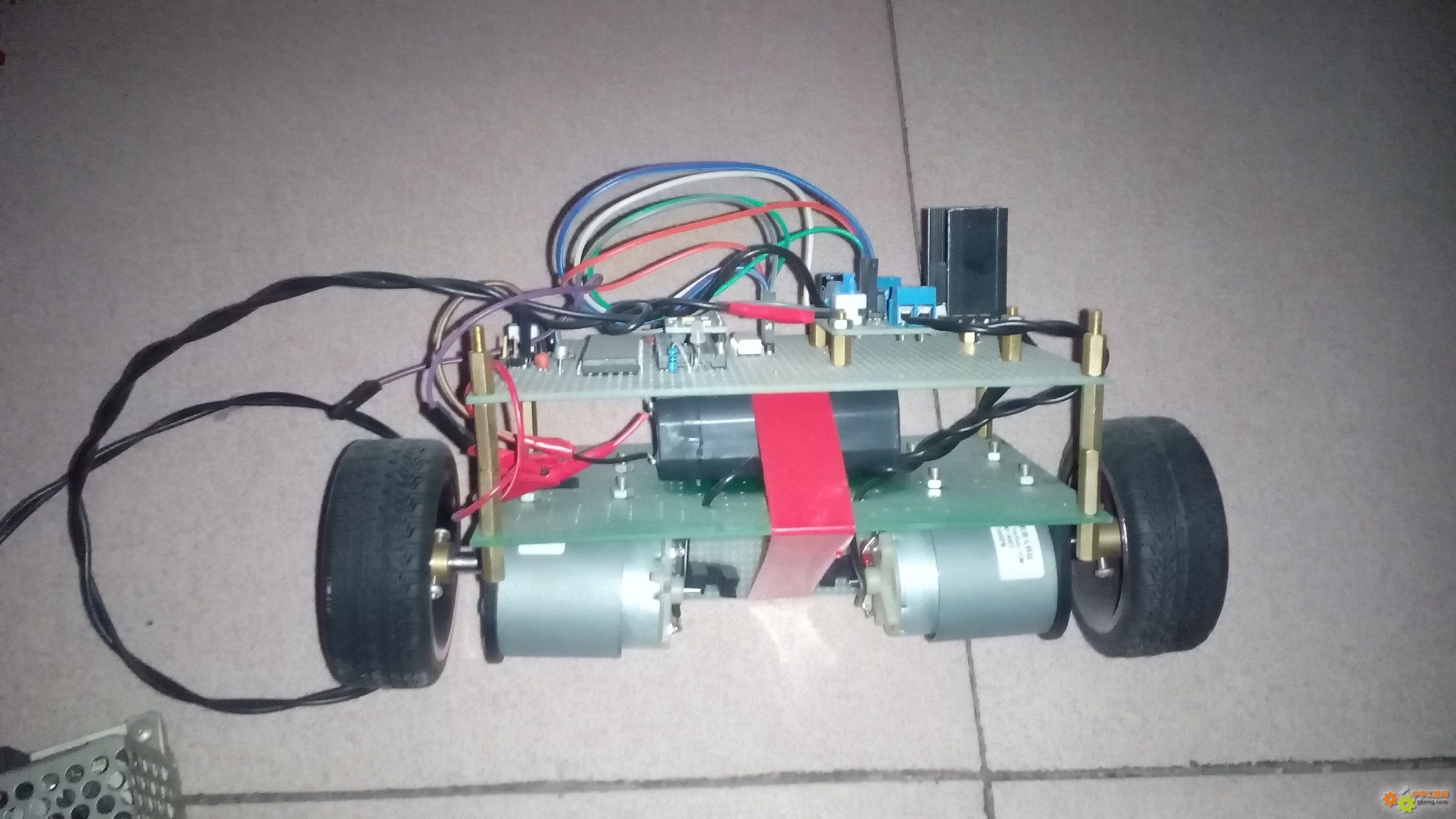
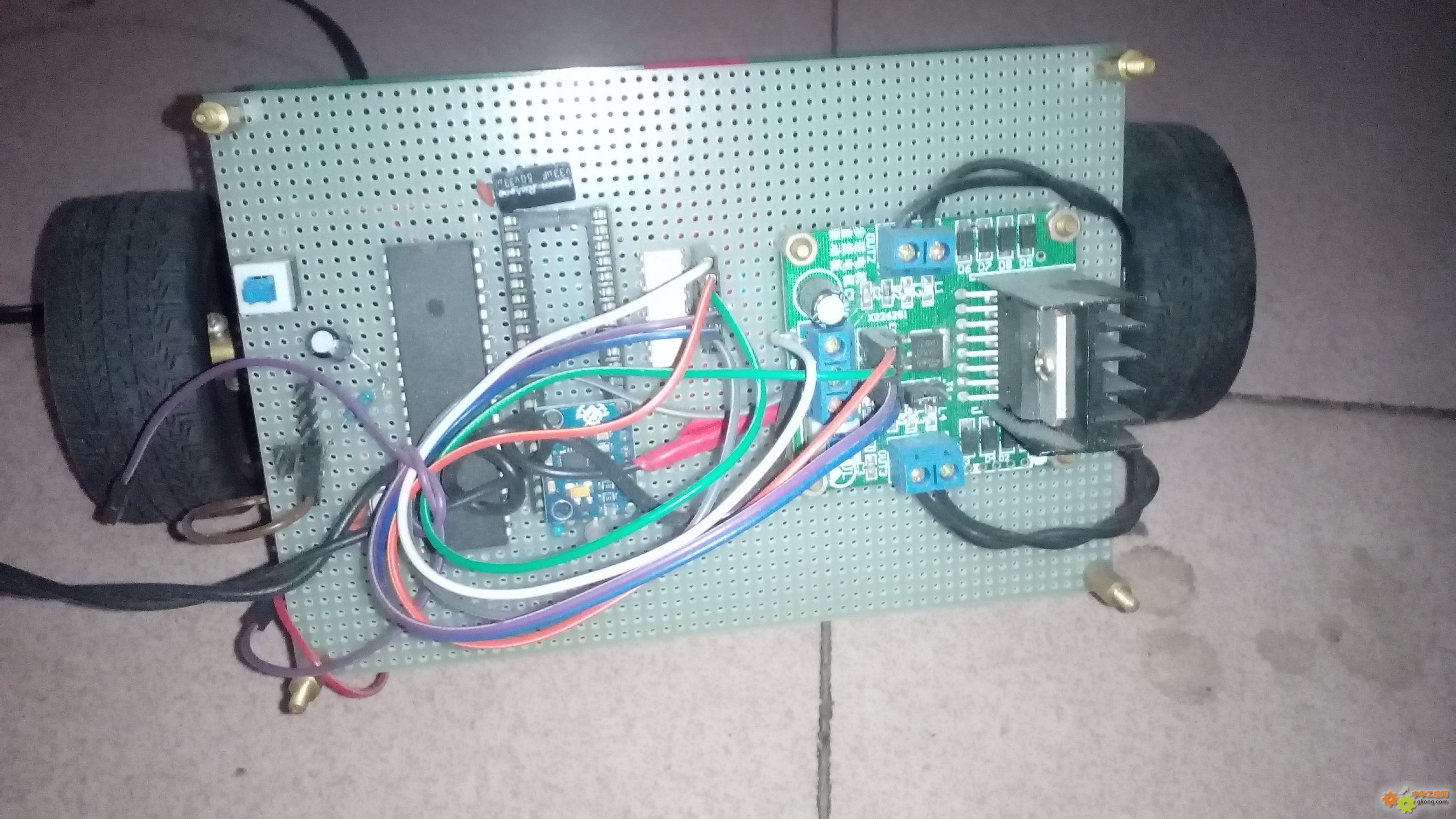
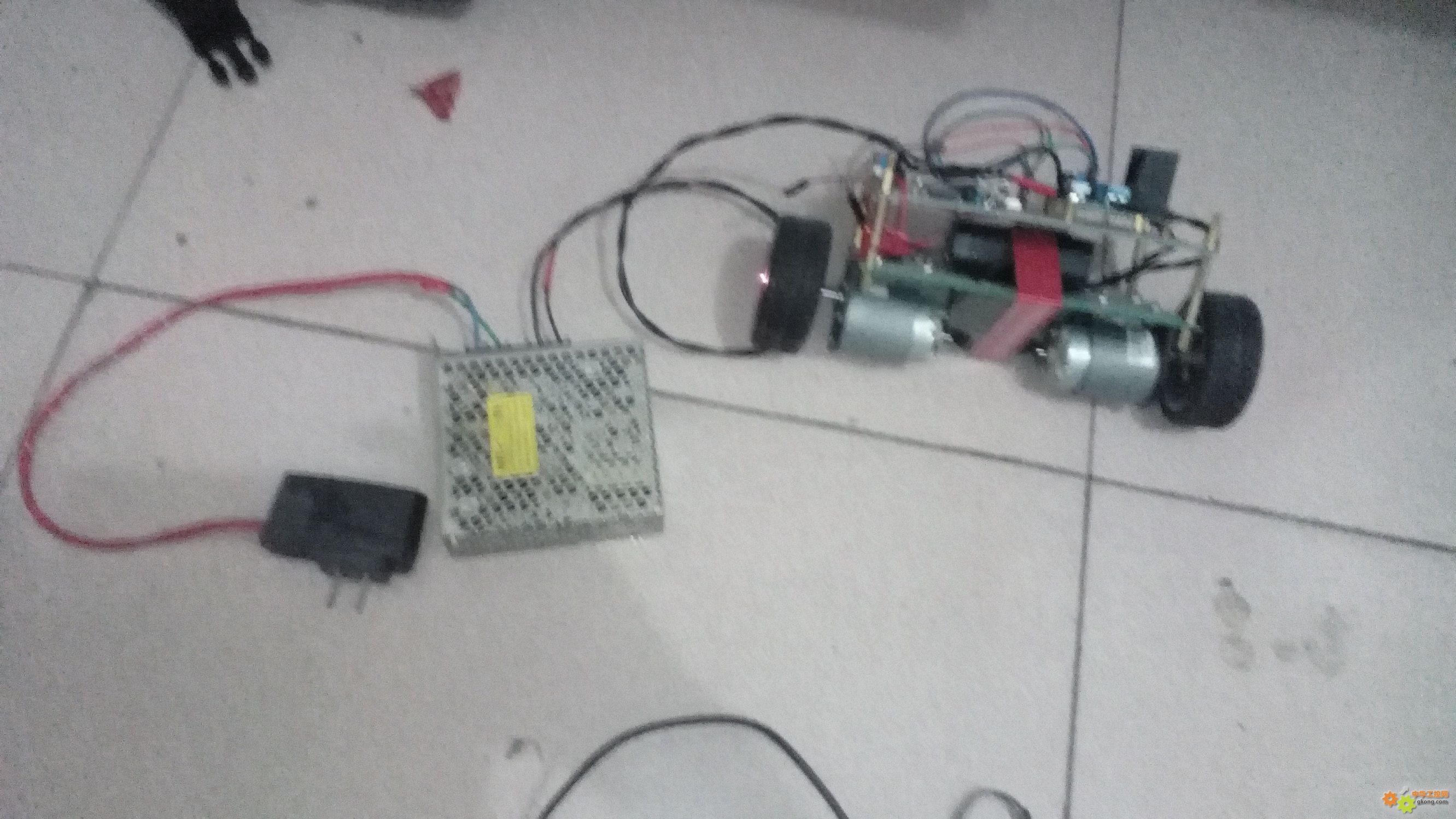
以下是小车
![附件 1.jpg]()
![附件 3.jpg]()
![附件 4.jpg]()
![附件 2.jpg]()
USB编程线


想起时正是忘记,V信:firedphoenix_he
————————
千古最难觅知音
面山闻水思伊人
————————
千古最难觅知音
面山闻水思伊人