














发表于:2025/12/18 12:35:22
#0楼
用到的手册,PDF
MR-JE-C 技术资料集(CC-Link IE现场网络Basic篇)
MR-JE-C技术资料集(轨迹模式篇)
~~~~~~~~~
根据硬件手册,FX5U网口可以代带16轴<不知道加上其它程序循环时间会不会爆炸>。
~~~~~~~~~~~~~~~~~
伺服网络设置,我简述一下:
面板有2个旋钮,sw1+sw2 如果是00 那么伺服的IP地址最后的地址是软件设置(用USB自行设置),如果是非00,地址=SW1+SW2的16进制转换到10进制的地址。
这里不再啰嗦,细节直接看手册去吧 MR-JE-C 技术资料集(CC-Link IE现场网络Basic篇)4.2 IP地址设定。
~~~~~~~~~~~~~~~~~~~~~~~~~
编程软件这边:
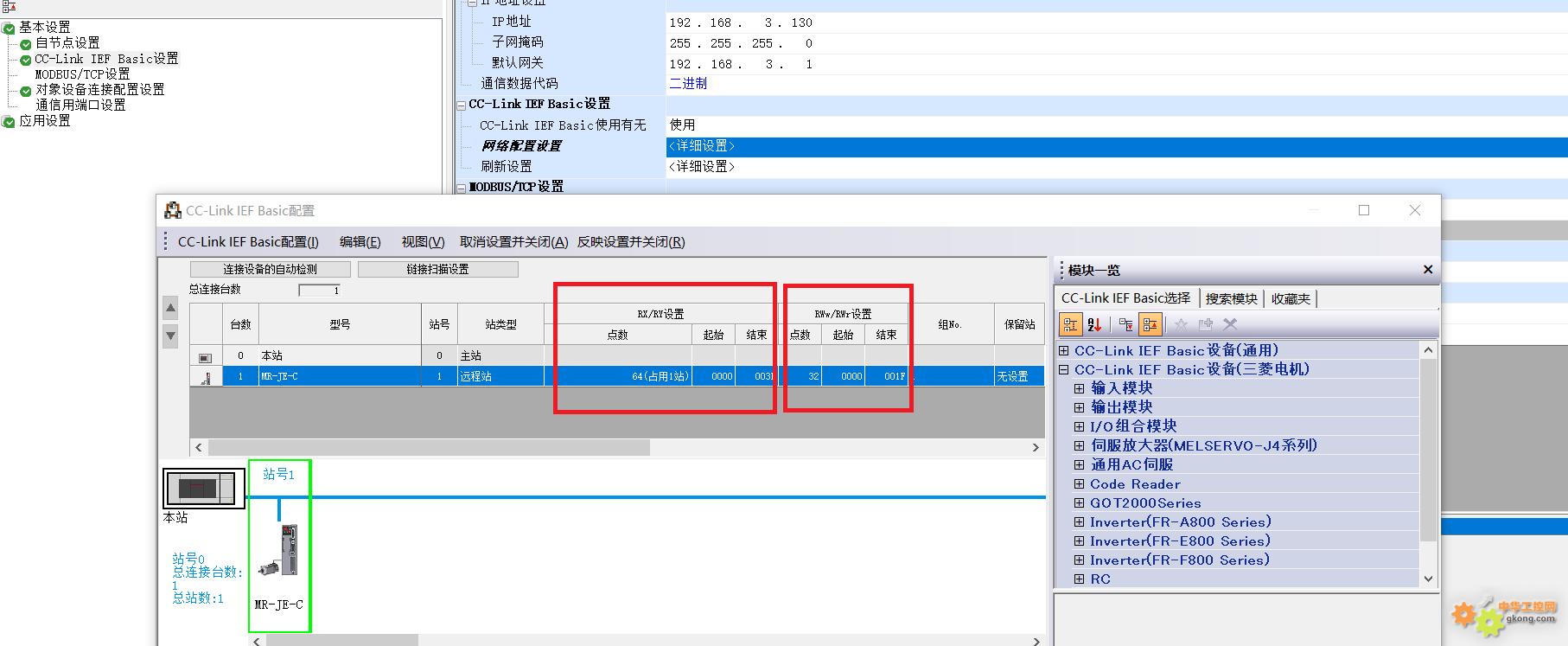
1,添加从站,<可以手动拖进去,也可以把伺服配置IP地址后然后自动检测扫描>
完成以后记得点 上面的 《反映设置并关闭》
![附件 01.jpg]()
~~~~~~~~~
2,链接软原件,RX,RY 占用64位,RWW RWR 占用32个字。
考虑到FB块通用性,这里直接考虑16轴配满,RX RY 用B区,RW 用W区,<B/W是16进制寻址>;
RX是CPU是伺服反馈给PLC的,64点*16轴=1024点,B0~B3FF
RY是CPU发送给伺服的,同样的点数,从B400-B7FF
RWr 读 W0-W1FF 32点*16轴=512点
RWw 写 W200-W3FF
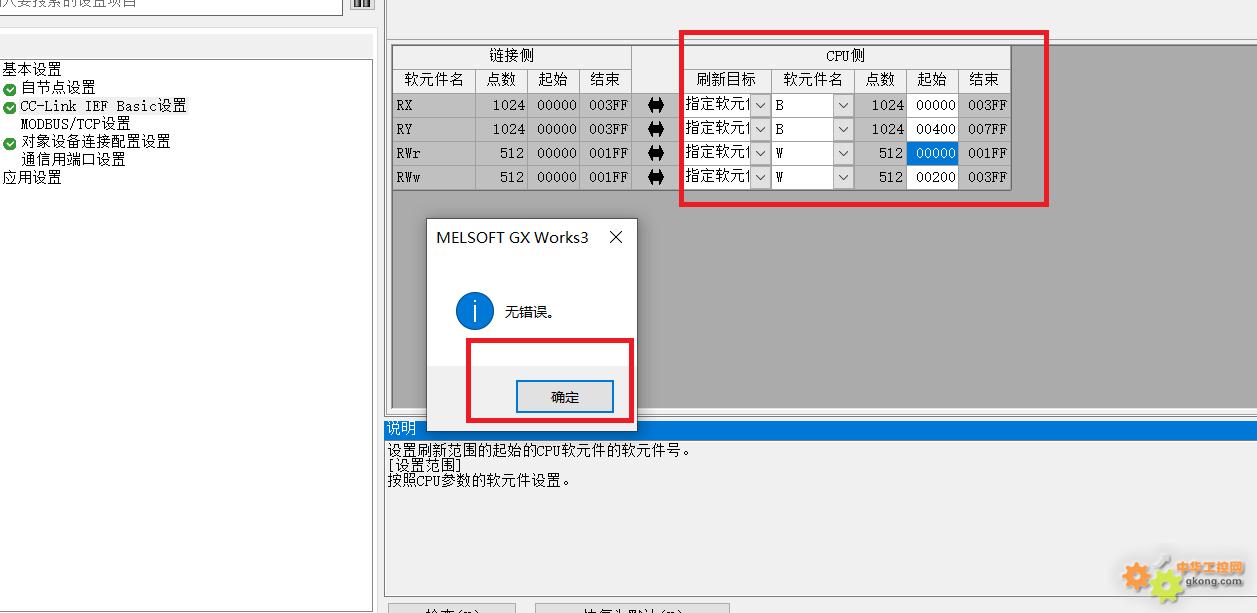
检查- 应用。
![附件 02.jpg]()
PS:记得CPU参数里面设置一下B 和W区域的大小,B合计要1024+1024=2048,W 需要512+512=1024点
然后下载到PLC即可。
~~~~~~~~~~
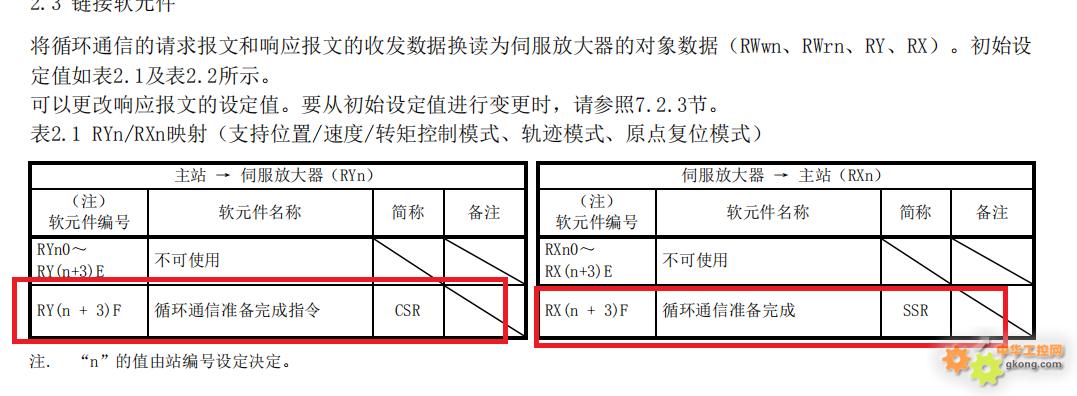
3,手册大致白话:
RX RY区域,只用64位最后一位(bit0~63),RY3.F(bit63)是通讯开始,RX3.F(bit63)是通讯OK。
![附件 03.jpg]()
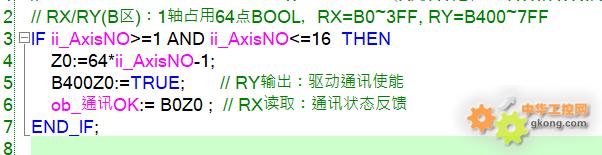
程序: 只要轴号在1-16即可驱动
![附件 04.jpg]()
RW区域:
我看了很多别人做的,都用的数组做的(估计都是抄袭吧),FB调用的时候,一次就用读取32个INT,写32个INT,还有上面的RX RY也是用的数组64个bool。
考虑节约性能,不用数组,还有,有些映射是DINT,数组是int,转换传送ST下面用MOV会报错(int-dint不能互相转),不是太友好。
![附件 05.jpg]()
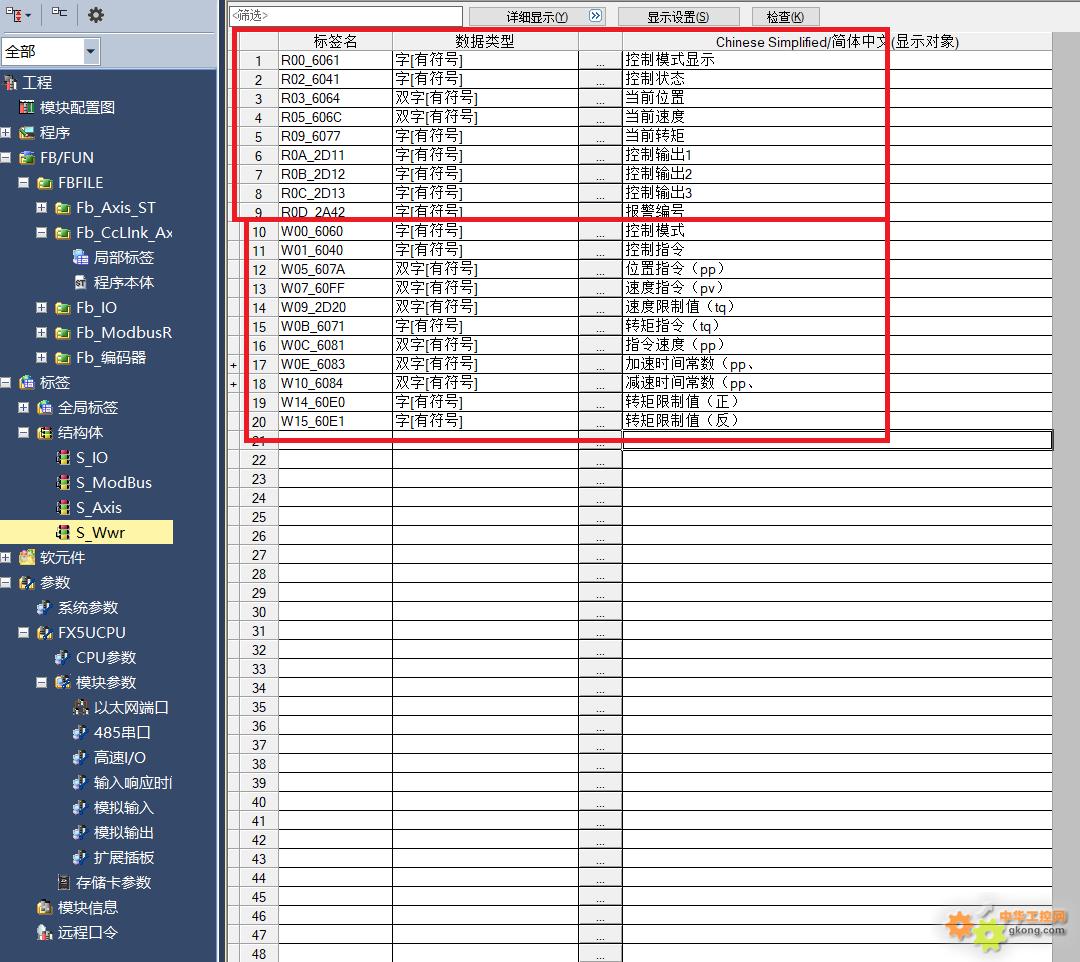
根据上面的表格,做一个结构体,方便使用修改
R是读,W是写,也方便区分
![附件 06.jpg]()
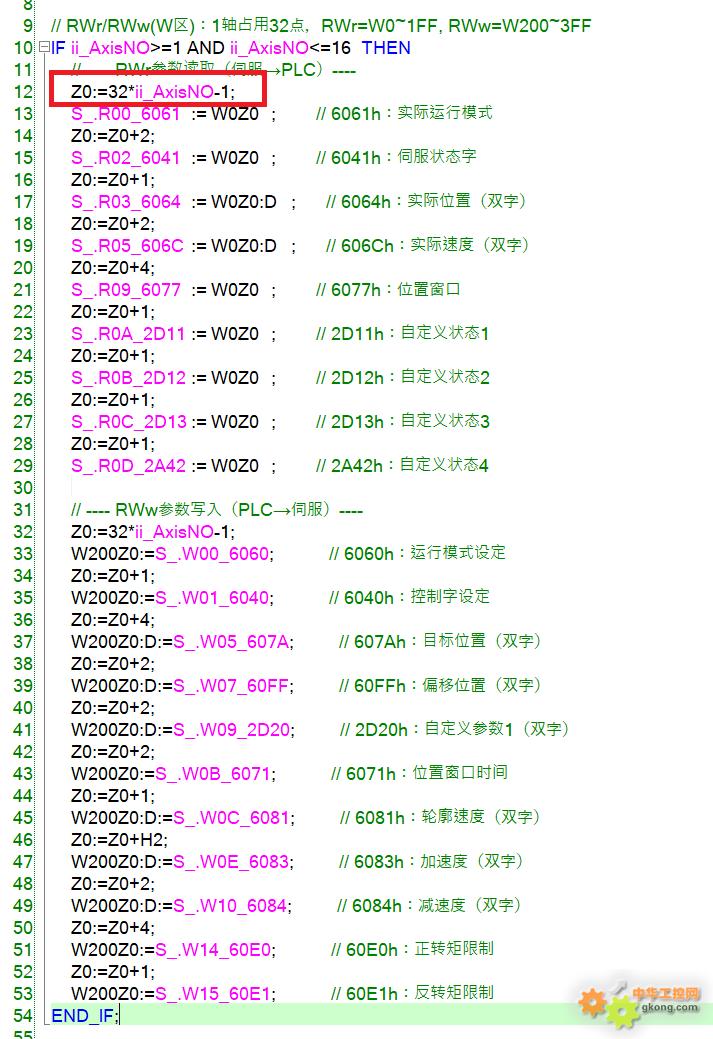
程序映射: 一个Z0干下去,只需要计算首字偏移量,然后跟着加偏移量就行,后续修改检查也不是太麻烦。
![附件 07.jpg]()
~~~~~~~~~~~~~~~
好了,上面的基本上就那样了,剩下就可以写程序了
轴控无非,SON,复位,回原点,JOG,相对,绝对,无非就是以上动作吧,点到点应用最多。
SON:
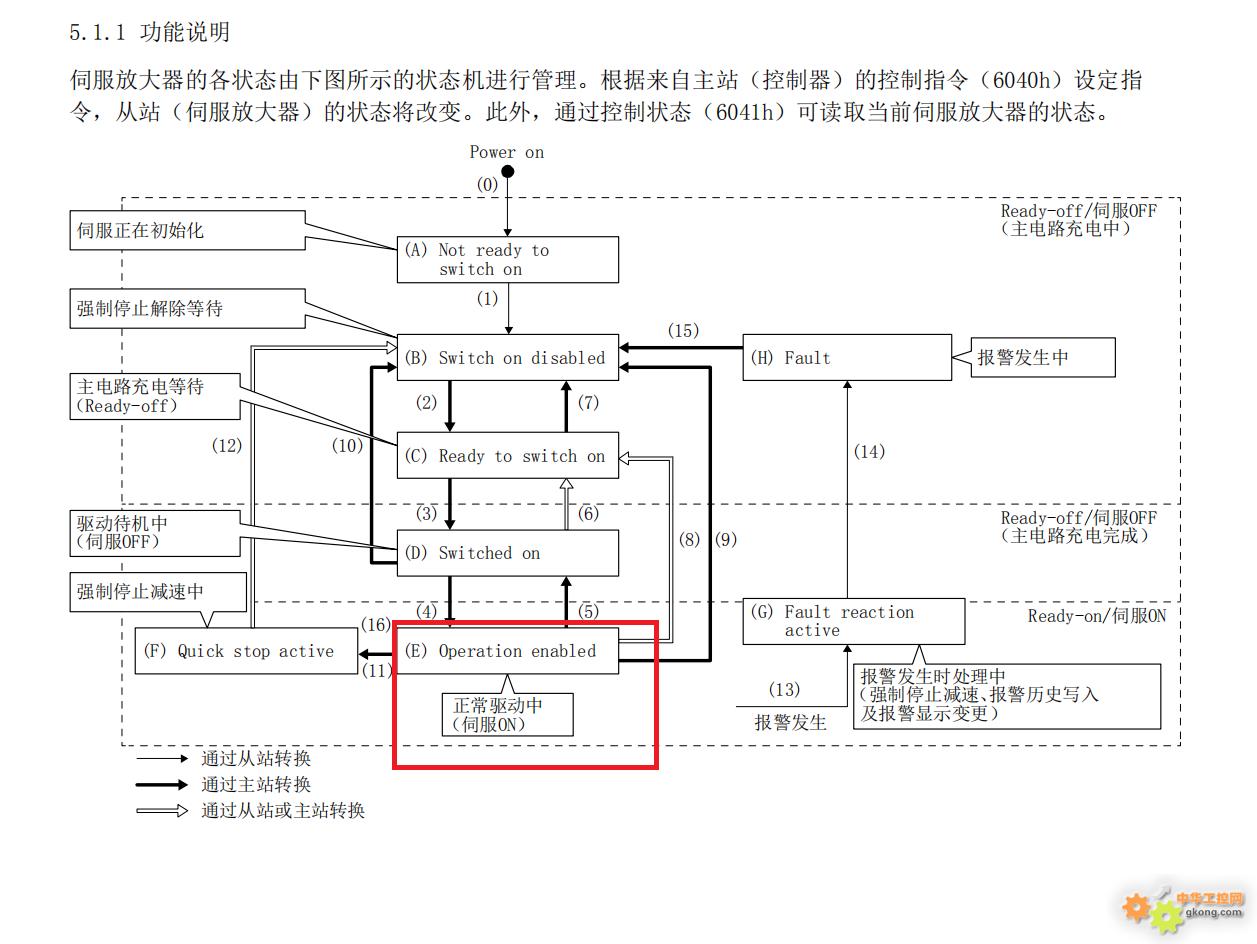
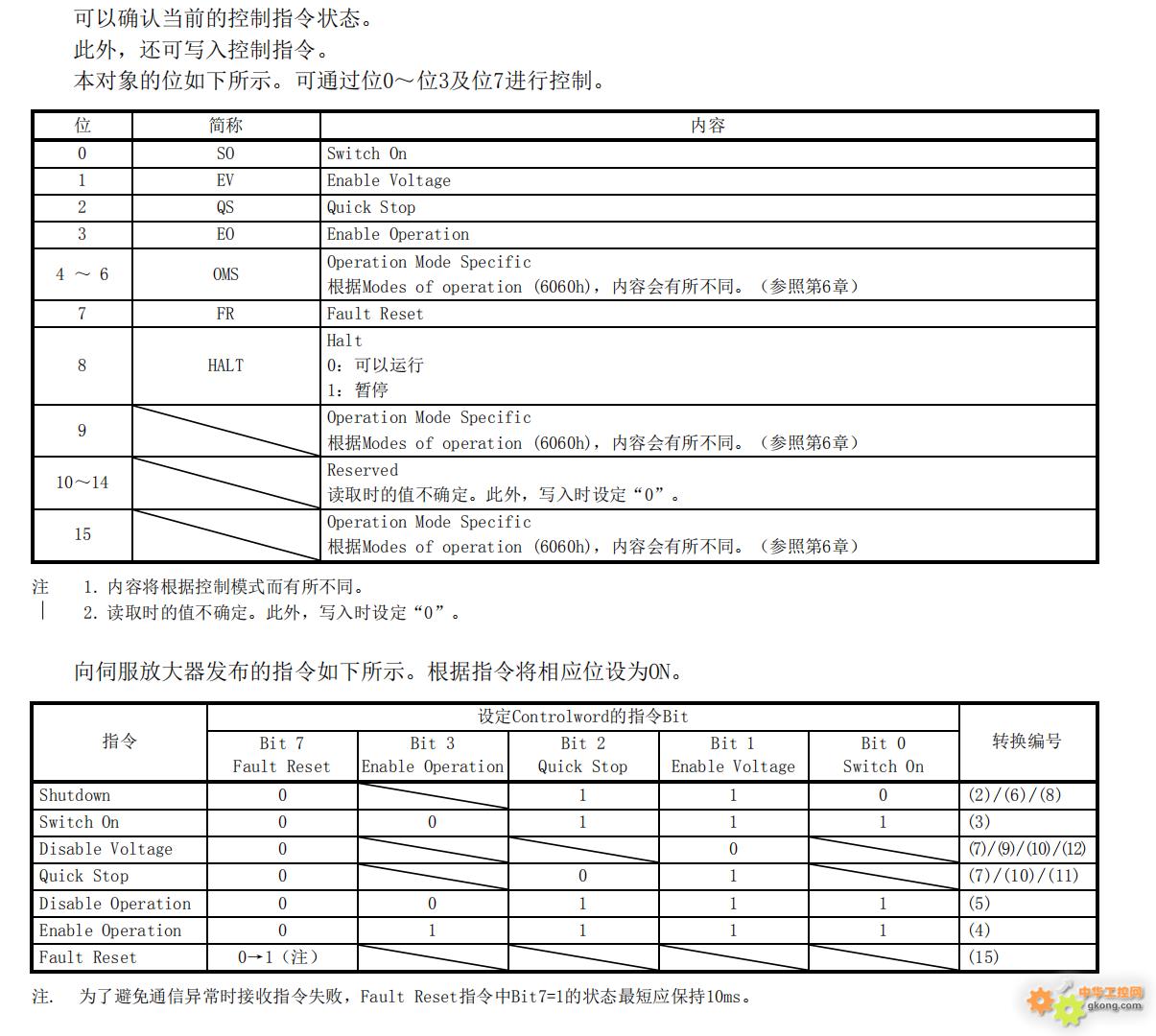
这个参考别人的程序,就是把控制字RW00-6040 写16#F 就OK了,手册给的状态机:
![附件 10.jpg]()
![附件 11.jpg]()
~~~~~~
以上,BIT0-BIT3是 SON,BIT7是复位故障,bit8是暂停,
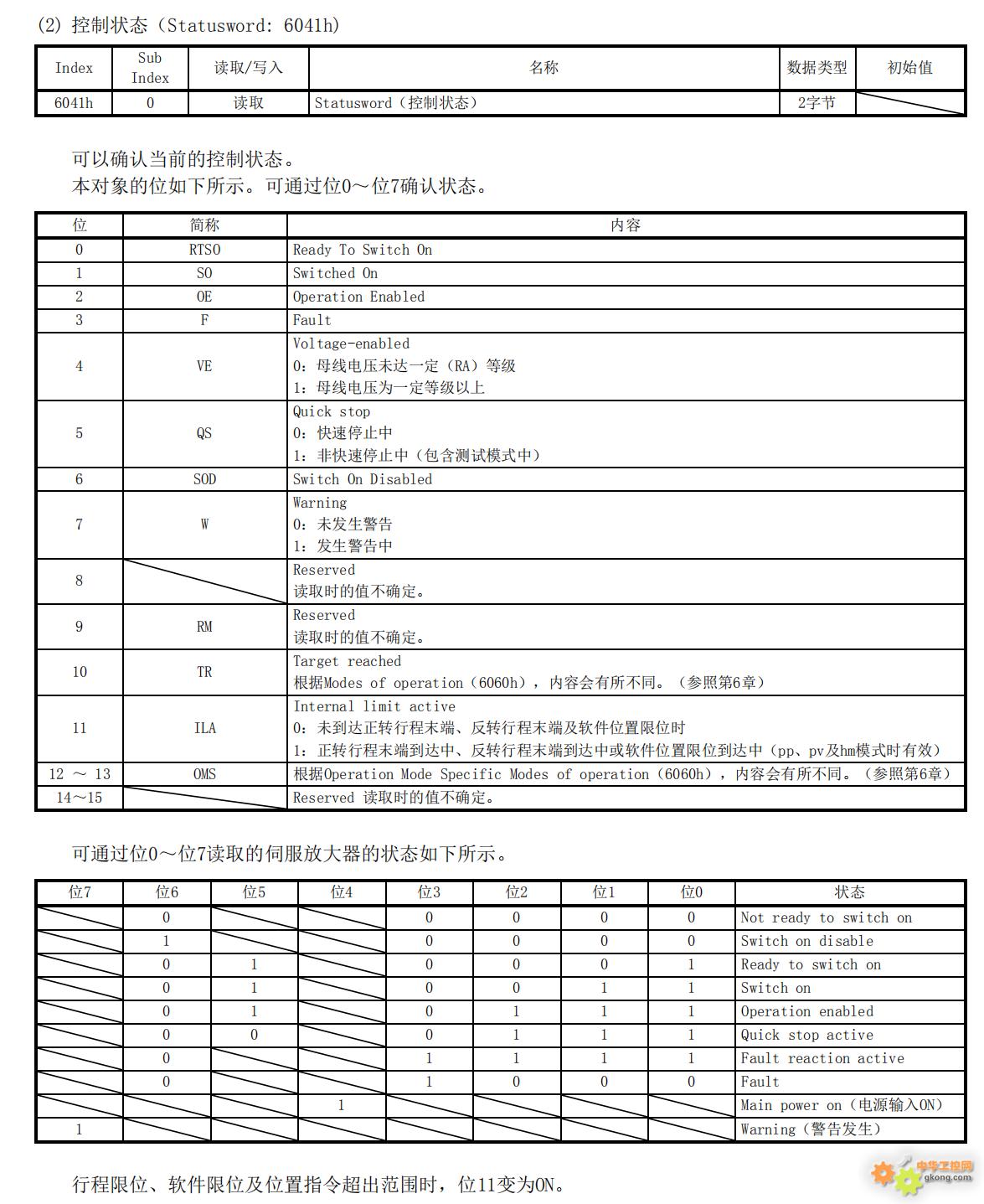
还有反馈可以读:RR-6041
![附件 12.jpg]()
~~~~~~~~
看别人写的很简答,我也从简吧
中午了,吃饭了,后续再来更新。
AI也挺SB的,Z0:=32*ii_AxisNO-1; 这样是错误的,它没发现,还是我发现的,哈哈哈
正确的应该是Z0:=32*(ii_AxisNO-1);这样计算偏移量应该就OK了;
后续有硬件了,我慢慢调试~
MR-JE-C 技术资料集(CC-Link IE现场网络Basic篇)
MR-JE-C技术资料集(轨迹模式篇)
附件:
[本地下载]附件:
[本地下载]~~~~~~~~~
根据硬件手册,FX5U网口可以代带16轴<不知道加上其它程序循环时间会不会爆炸>。
~~~~~~~~~~~~~~~~~
伺服网络设置,我简述一下:
面板有2个旋钮,sw1+sw2 如果是00 那么伺服的IP地址最后的地址是软件设置(用USB自行设置),如果是非00,地址=SW1+SW2的16进制转换到10进制的地址。
这里不再啰嗦,细节直接看手册去吧 MR-JE-C 技术资料集(CC-Link IE现场网络Basic篇)4.2 IP地址设定。
~~~~~~~~~~~~~~~~~~~~~~~~~
编程软件这边:
1,添加从站,<可以手动拖进去,也可以把伺服配置IP地址后然后自动检测扫描>
完成以后记得点 上面的 《反映设置并关闭》
~~~~~~~~~
2,链接软原件,RX,RY 占用64位,RWW RWR 占用32个字。
考虑到FB块通用性,这里直接考虑16轴配满,RX RY 用B区,RW 用W区,<B/W是16进制寻址>;
RX是CPU是伺服反馈给PLC的,64点*16轴=1024点,B0~B3FF
RY是CPU发送给伺服的,同样的点数,从B400-B7FF
RWr 读 W0-W1FF 32点*16轴=512点
RWw 写 W200-W3FF
检查- 应用。
PS:记得CPU参数里面设置一下B 和W区域的大小,B合计要1024+1024=2048,W 需要512+512=1024点
然后下载到PLC即可。
~~~~~~~~~~
3,手册大致白话:
RX RY区域,只用64位最后一位(bit0~63),RY3.F(bit63)是通讯开始,RX3.F(bit63)是通讯OK。
程序: 只要轴号在1-16即可驱动
RW区域:
我看了很多别人做的,都用的数组做的(估计都是抄袭吧),FB调用的时候,一次就用读取32个INT,写32个INT,还有上面的RX RY也是用的数组64个bool。
考虑节约性能,不用数组,还有,有些映射是DINT,数组是int,转换传送ST下面用MOV会报错(int-dint不能互相转),不是太友好。
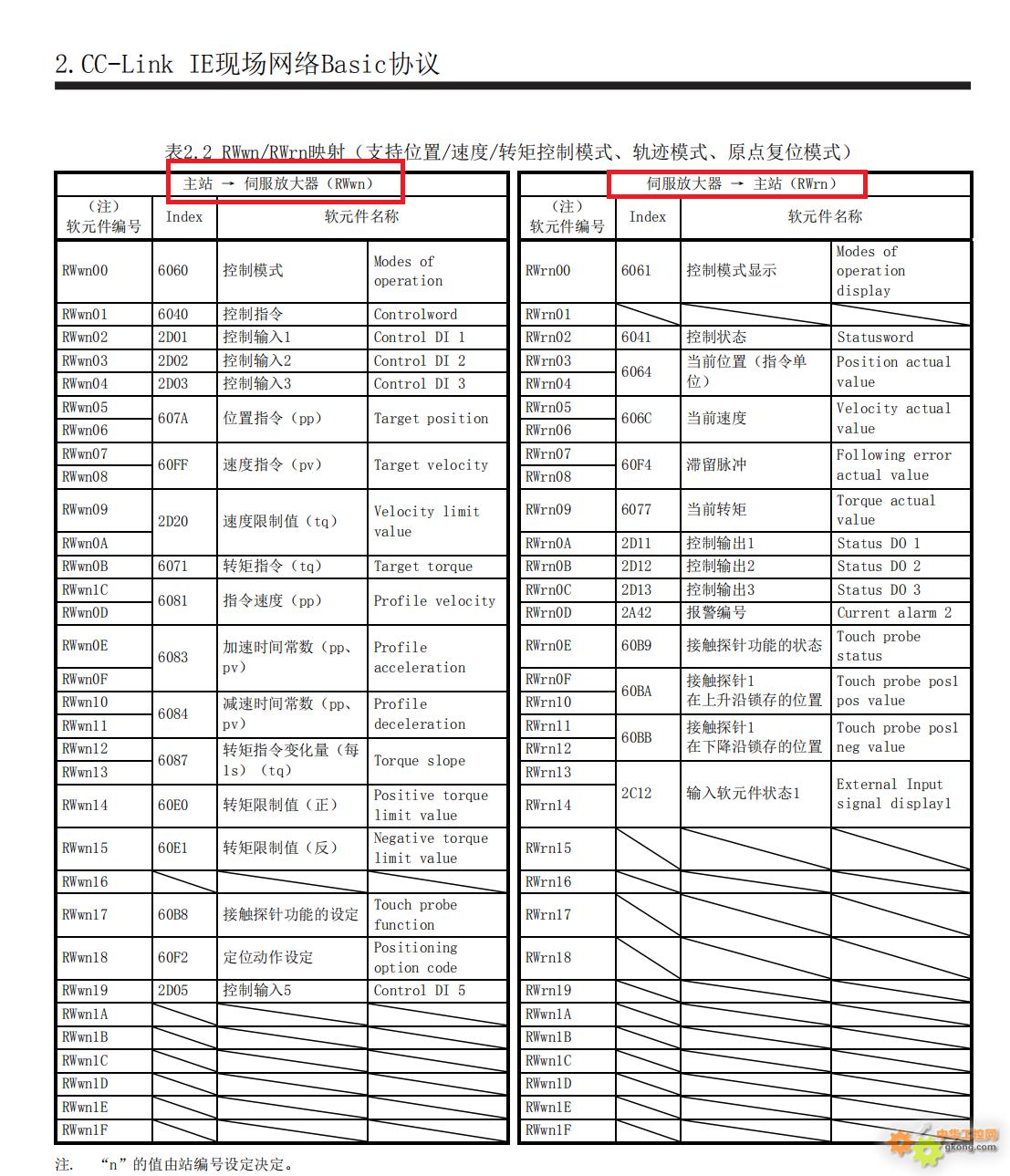
根据上面的表格,做一个结构体,方便使用修改
R是读,W是写,也方便区分
程序映射: 一个Z0干下去,只需要计算首字偏移量,然后跟着加偏移量就行,后续修改检查也不是太麻烦。
~~~~~~~~~~~~~~~
好了,上面的基本上就那样了,剩下就可以写程序了
轴控无非,SON,复位,回原点,JOG,相对,绝对,无非就是以上动作吧,点到点应用最多。
SON:
这个参考别人的程序,就是把控制字RW00-6040 写16#F 就OK了,手册给的状态机:
~~~~~~
以上,BIT0-BIT3是 SON,BIT7是复位故障,bit8是暂停,
还有反馈可以读:RR-6041
~~~~~~~~
看别人写的很简答,我也从简吧
中午了,吃饭了,后续再来更新。
AI也挺SB的,Z0:=32*ii_AxisNO-1; 这样是错误的,它没发现,还是我发现的,哈哈哈
正确的应该是Z0:=32*(ii_AxisNO-1);这样计算偏移量应该就OK了;
后续有硬件了,我慢慢调试~
[此贴子已经被jint于2025/12/19 10:00:27编辑过]



















