发表于:2024/9/4 9:25:05
#0楼
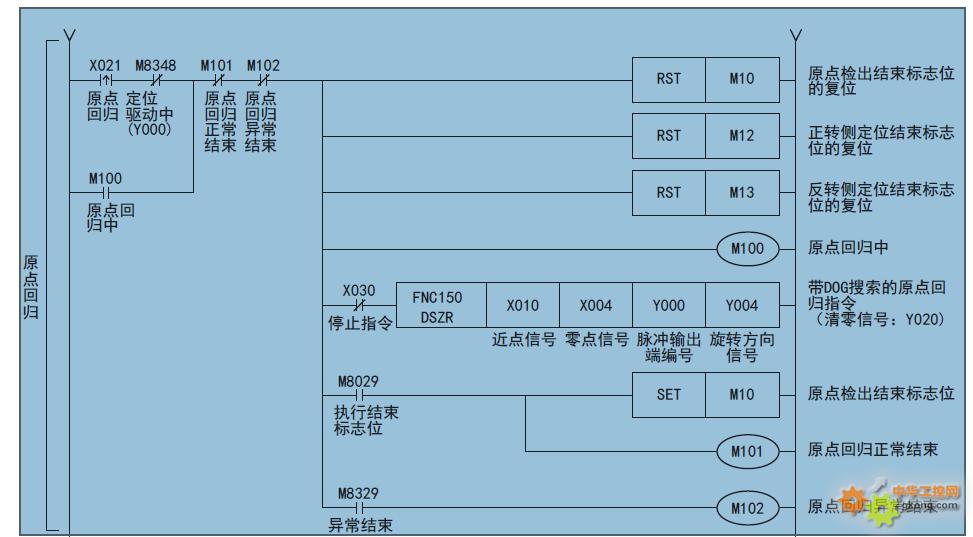
关于FX3U回原点和定位完成的写法:手册里的写法都是以M8029为标准,只要回原点或者定位指令下的M8029接通,就默认定位指令已经完成。如下图所示;![附件 111.jpg]()
![附件 222.jpg]()
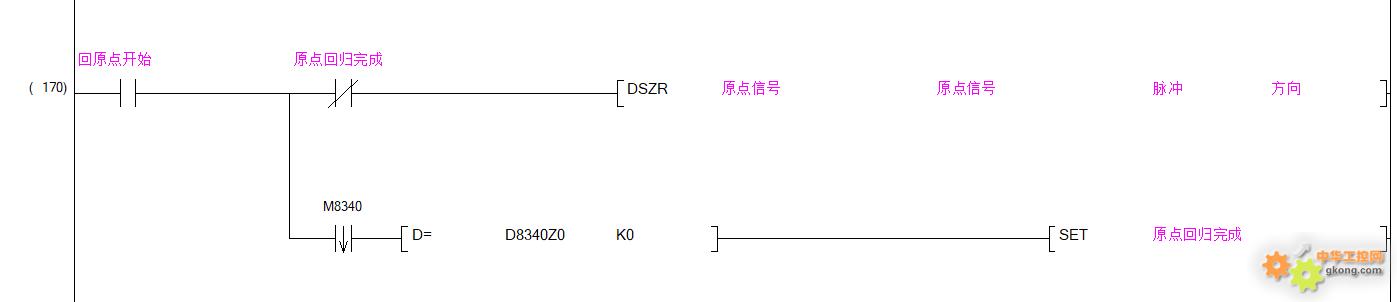
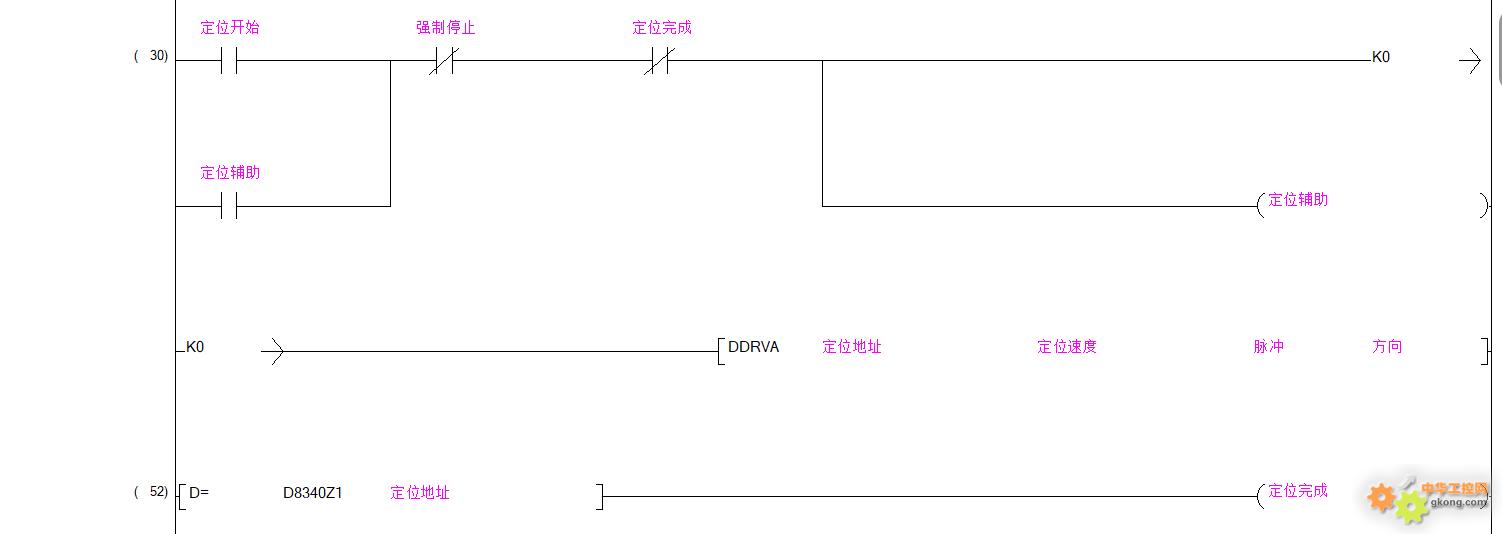
但在实际项目中,淘宝买的模板上,有人做了定位的FB块,结合变址的方式编程,他的回原点结束和定位结束都没有用到M8029,而是将当前位置与目标位置做比较来判断。那么三菱FX3U的定位指令,定位完成的判断以M8029标志位接通为准,还是以当前位置与目标位置的判断为准?给位大佬实际编程的做法是什么?那种定位判断比较准确可靠一点?
![附件 333.jpg]()
![附件 444.jpg]()

但在实际项目中,淘宝买的模板上,有人做了定位的FB块,结合变址的方式编程,他的回原点结束和定位结束都没有用到M8029,而是将当前位置与目标位置做比较来判断。那么三菱FX3U的定位指令,定位完成的判断以M8029标志位接通为准,还是以当前位置与目标位置的判断为准?给位大佬实际编程的做法是什么?那种定位判断比较准确可靠一点?