发表于:2024/4/29 8:14:24
#0楼
运动控制主要是应用于控制步进电机和伺服电机,比如控制步进电
机正转 5 圈,再反转 5 圈等,可以用到软件中的运动指令。
【控制要求】
控制一台步进电机,电机驱动细分是 2000(电子齿轮比为 1:1),控制
两个气缸电磁阀。
按下启动开关(不带锁开关,按下一次,给一次信号),触发气缸 1 推
出,保持 2s,电机正转 3 圈,电机停止后触发气缸 2 推出,保持 3s 后触
发气缸 1 缩回,电机再反转 2 圈,停止后触发气缸 2 缩回,保持 1s。
【动作分析】
按下启动开关就是添加一个等待输入的指令,触发气缸 1 推出,就是
添加触发输出指令,触发 Y1 通,延时 2s,添加延时等待指令。
电机转动圈数跟驱动细分有关,在电子齿轮比为 1:1 的前提下,驱动
细分是 2000,则是 2000 个脉冲为 1 圈。电机正转 3 圈,就是 PLC 发
出的脉冲数为 2000×3=6000,添加单轴运动指令,电机正向运行,运
行方式为增量,位移值(脉冲数)为 6000,要等待轴停止,再添加一条
单轴等待指令。
电机停止之后,触发气缸 2 推出,添加触发输出指令,触发 Y2 通,
延时 3s 后触发 Y1 断,气缸 1 缩回。
电机反转 2 圈,添加单轴运动,选择反向运行,运行方式为增量,位
移值(脉冲数)为 2000×2=4000,要等待轴停止,再添加一条单轴等
待指令。电机停止后添加触发输出,触发 Y2 断,延时 1s。
【控制流程图】
按照动作分析,每一个动作就是一个指令,每个指令用流程图的方式连
接起来。
![附件 微信图片_20240429080827.jpg]() 【修改别名】
【修改别名】
在软件别名处,对动作需要用到的端口进行别名修改:
![附件 微信图片_20240326090159.jpg]() 输入端别名修改:X0:启动开关。
输入端别名修改:X0:启动开关。
![附件 微信图片_20240429081120.jpg]() 输出端别名修改:Y1:气缸 1、Y2:气缸 2
输出端别名修改:Y1:气缸 1、Y2:气缸 2
![附件 微信图片_20240429081207.jpg]() 单轴运动不需要修改别名,添加运动指令的时候,在属性框中选择轴号就可
单轴运动不需要修改别名,添加运动指令的时候,在属性框中选择轴号就可
以了,系统默认初选轴为轴 1。 【程序编辑】
在时序环 0 中按照控制流程图编辑程序。
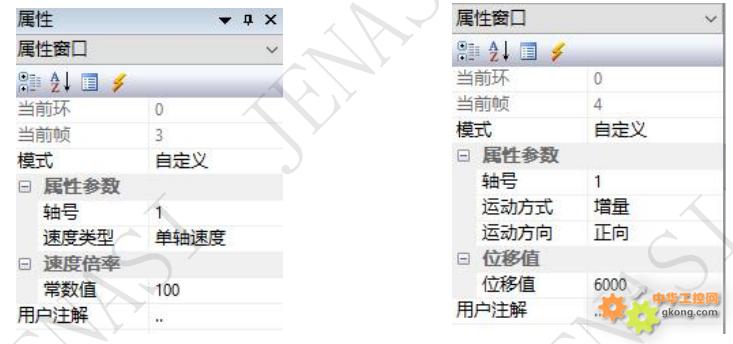
![附件 微信图片_20240429081304.jpg]() 其中运动指令,单轴运动正转属性框设置:
其中运动指令,单轴运动正转属性框设置:
![附件 微信图片_20240429081356.jpg]() 单轴运动反转属性框设置:
单轴运动反转属性框设置:
![附件 微信图片_20240429081441.jpg]()
机正转 5 圈,再反转 5 圈等,可以用到软件中的运动指令。
【控制要求】
控制一台步进电机,电机驱动细分是 2000(电子齿轮比为 1:1),控制
两个气缸电磁阀。
按下启动开关(不带锁开关,按下一次,给一次信号),触发气缸 1 推
出,保持 2s,电机正转 3 圈,电机停止后触发气缸 2 推出,保持 3s 后触
发气缸 1 缩回,电机再反转 2 圈,停止后触发气缸 2 缩回,保持 1s。
【动作分析】
按下启动开关就是添加一个等待输入的指令,触发气缸 1 推出,就是
添加触发输出指令,触发 Y1 通,延时 2s,添加延时等待指令。
电机转动圈数跟驱动细分有关,在电子齿轮比为 1:1 的前提下,驱动
细分是 2000,则是 2000 个脉冲为 1 圈。电机正转 3 圈,就是 PLC 发
出的脉冲数为 2000×3=6000,添加单轴运动指令,电机正向运行,运
行方式为增量,位移值(脉冲数)为 6000,要等待轴停止,再添加一条
单轴等待指令。
电机停止之后,触发气缸 2 推出,添加触发输出指令,触发 Y2 通,
延时 3s 后触发 Y1 断,气缸 1 缩回。
电机反转 2 圈,添加单轴运动,选择反向运行,运行方式为增量,位
移值(脉冲数)为 2000×2=4000,要等待轴停止,再添加一条单轴等
待指令。电机停止后添加触发输出,触发 Y2 断,延时 1s。
【控制流程图】
按照动作分析,每一个动作就是一个指令,每个指令用流程图的方式连
接起来。

在软件别名处,对动作需要用到的端口进行别名修改:



以了,系统默认初选轴为轴 1。 【程序编辑】
在时序环 0 中按照控制流程图编辑程序。