发表于:2024/4/10 14:17:36
#10楼
具体做法如下:
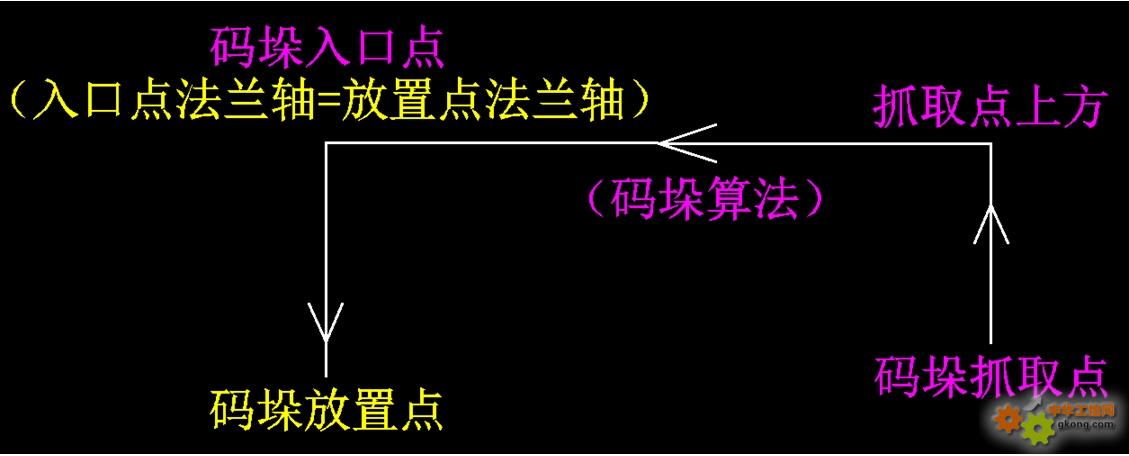
原先码垛机器人的搬运路径是:从码垛抓取点抓取产品→垂直抬起抓手到一定的安全高度(抓取点上方)→移动码垛机到达相对应的码垛入口点→根据垛数执行码垛算法→移动码垛机到达码垛放置点→打开抓手放下产品,然后沿着原路返回,等待下一轮码垛搬运。
改善之后的搬运路径是:从码垛抓取点抓取产品→垂直抬起抓手到一定的安全高度(抓取点上方)→根据垛数执行码垛算法→把码垛放置点的角度坐标赋值给码垛入口点的角度变量→移动码垛机到达相对应的码垛入口点→移动码垛机到达码垛放置点→打开抓手放下产品,然后沿着原路返回,等待下一轮码垛搬运。
![附件 005.jpg]()
通过优化之后的路径,可以发现,码垛机从抓取点上方移动到码垛入口点时,已经提前旋转好角度,即使码垛机全速运行,也不再报警了。
至此,四面平整不倒塌的高质量的编织袋码垛就做好了。
原先码垛机器人的搬运路径是:从码垛抓取点抓取产品→垂直抬起抓手到一定的安全高度(抓取点上方)→移动码垛机到达相对应的码垛入口点→根据垛数执行码垛算法→移动码垛机到达码垛放置点→打开抓手放下产品,然后沿着原路返回,等待下一轮码垛搬运。
改善之后的搬运路径是:从码垛抓取点抓取产品→垂直抬起抓手到一定的安全高度(抓取点上方)→根据垛数执行码垛算法→把码垛放置点的角度坐标赋值给码垛入口点的角度变量→移动码垛机到达相对应的码垛入口点→移动码垛机到达码垛放置点→打开抓手放下产品,然后沿着原路返回,等待下一轮码垛搬运。
通过优化之后的路径,可以发现,码垛机从抓取点上方移动到码垛入口点时,已经提前旋转好角度,即使码垛机全速运行,也不再报警了。
至此,四面平整不倒塌的高质量的编织袋码垛就做好了。