













发表于:2022/3/2 14:29:53
#0楼
第一 :MR-JE-C伺服通过CC-Link IE Field Basic网络实现原点回归操作
介绍:
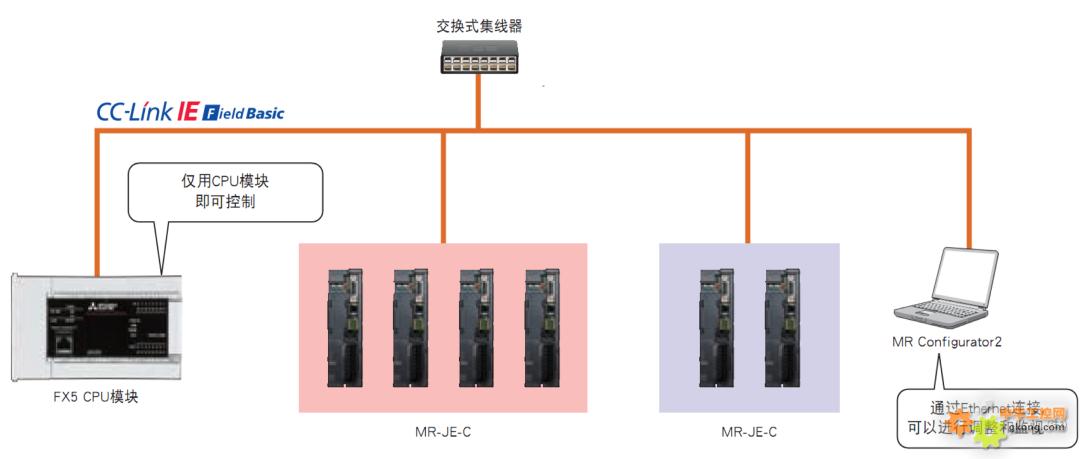
主要讲解三菱MR-JE-C产品,在配置文件方式控制模式下,通过CC-LINK IE Field Basic通讯,实现伺服原点回归功能的基础知识和基本操作方法。可以独立使用三菱FX 5U PLC控制MR-JE-C伺服,进行最简单的伺服原点回归操作。
亮点:
1.FX5U通过CC-Link IE Field Basic通信功能,进行数据设置方式原点回归的设置内容和操作步骤。
2.FX5U通过CC-Link IE Field Basic通信功能,进行配置文件方式下速度控制和原点回归的操作和监视方法。
功能介绍:
原点回归是使定位指令装置的指令坐标与机械坐标一致的必须操作之一。在使用JE-C 时有2种方式实现定位控制的原点回归。
A 当使用脉冲控制伺服定位时,可以使用定位模块的原点回归功能实现原点回归。
B 使用内置定位或网络通讯控制定位时,使用伺服内置原点回归功能实现原点回归。
硬件配置:
![附件 1_.jpg]()
进行原点回归条件要求:
A. 电机和机械安装完成
B. 正确完成接线
C. 正确设置PLC和伺服参数
D. 放大器和PLC间通讯建立
E. 全部正常无报警
原点回归的操作步骤:
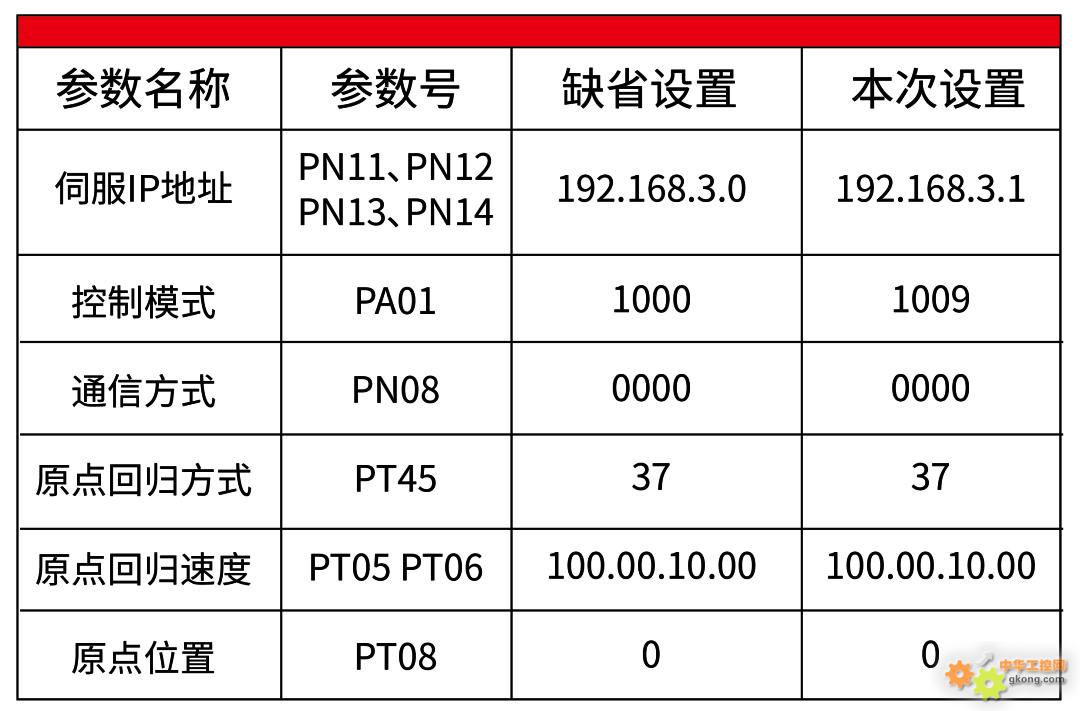
1 伺服参数设置
主要检查、设置以下参数:
![附件 2_.jpg]()
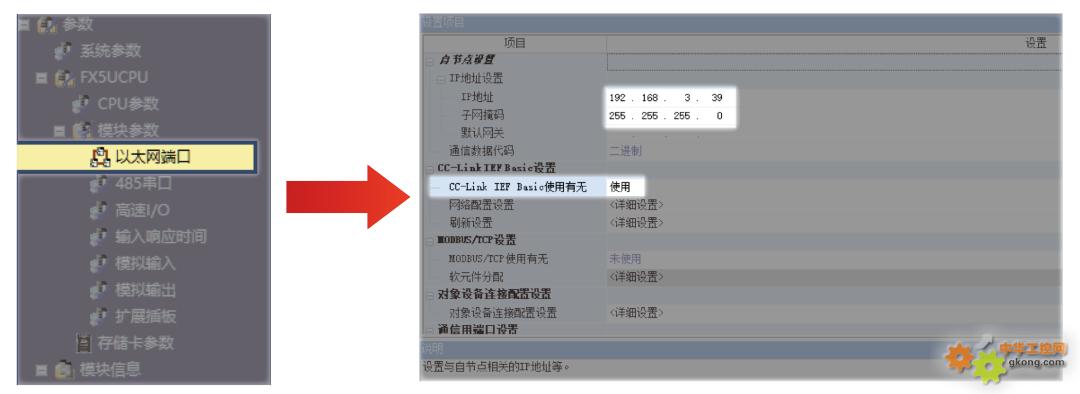
2 PLC侧参数设置
A 设置PLC IP地址和是否使用CC-Link IE Field Basic功能
![附件 3_.jpg]()
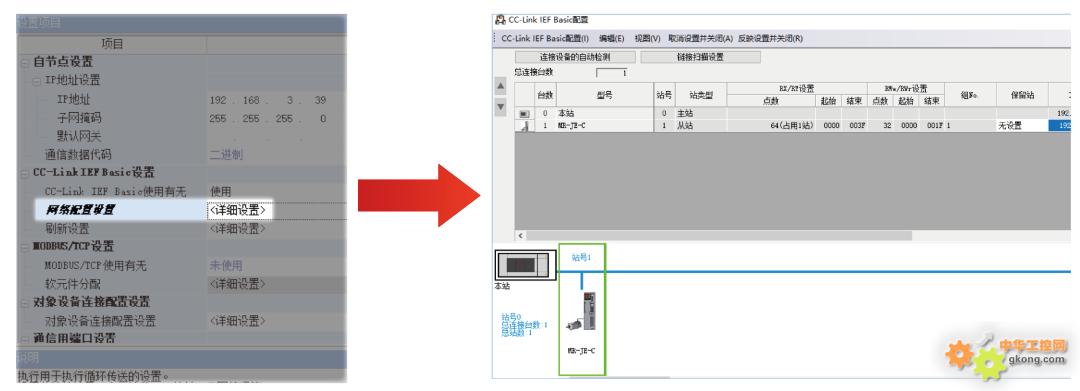
B CC-Link IE Field Basic网络配置
![附件 4_.jpg]()
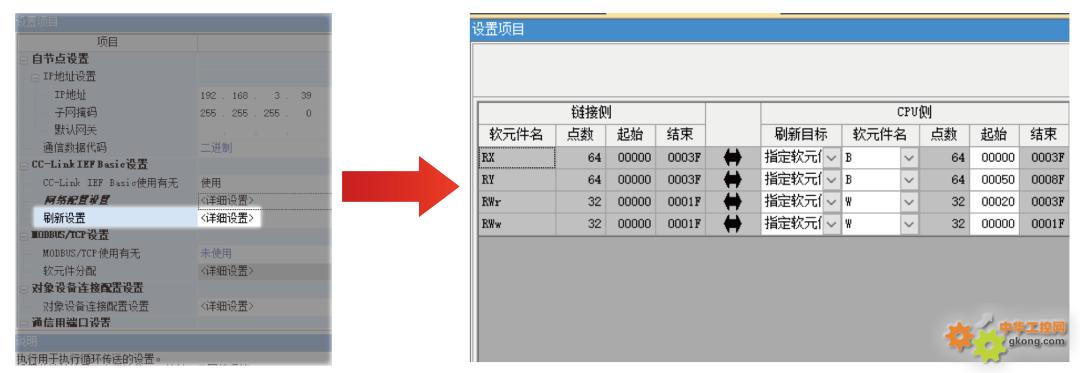
C CC-Link IE Field Basic网络的刷新设置
![附件 5_.jpg]()
3 PLC侧程序制作
建立连接:对应伺服的 Y3F对应软元件 B8F 置 ON
![附件 6_.jpg]()
编写配置文件速度模式应用程序
编写原点回归控制模式程序:位置控制模式6060设置为6,伺服处于原点回归模式
![附件 7_.jpg]()
编写原定回归操作启动程序
![附件 8_.jpg]()
执行原点回归操作
参数、程序编制、写入完成后,进行断电、上电操作
GX Works3 软件与PLC连接并进入监视模式。
使用速度模式使电机旋转 1转以上
切换到原点回归模式
启动原点回归
观察是否确实完成原点回归
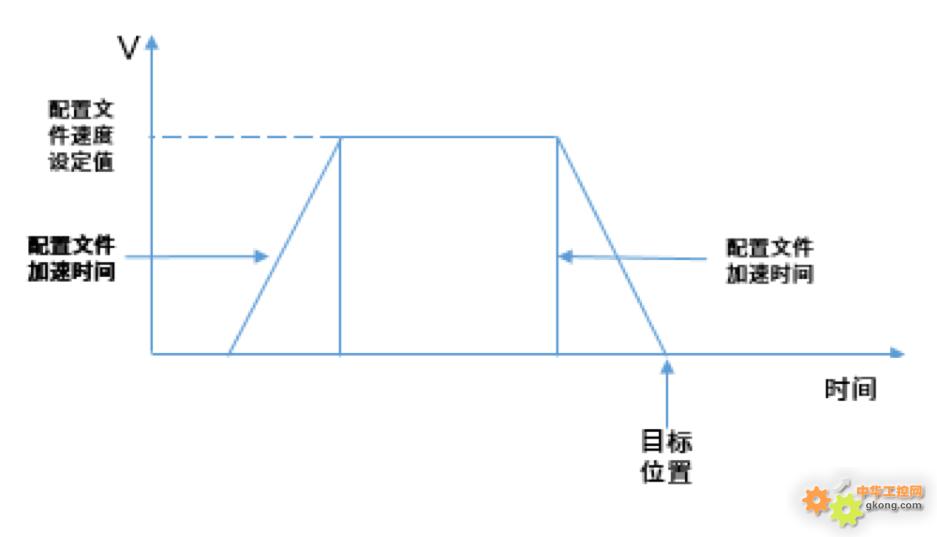
第二 : MR-JE-C伺服通过CC-Link IE Field Basic网络实现轨迹位置控制操作
从控制器给出目标位置(Target position) 、启动后电机运行。
因为不是使用逐次位置(fΔt)指令,所以无需通过控制器进行位置指令运算。
从控制器侧可以控制或监视每组最多16轴、共64轴的伺服放大器。
![附件 9_.jpg]()
功能特点
该功能是通过MR-JE-C系列伺服采用CC-Link IE Field Basic网络实现位置控制,该网络不使用专用ASIC而只需安装软件来实现循环通信的标准Ethernet基础的协议,可以与TCP/IP通信并存,以构筑高自由度的系统。
通过简单有限几个映射地址,既可以完成位置控制的全部相关位置、速度等参数设定和启动,使用灵活方便
功能的用处
MR-JE-C采用CC-Link IE Field Basic网络实现伺服控制主要应用于系统响应性能要求不高、网络信息指令传输需求,有成本控制需求、还需精确定位的控制场合。
功能的使用方法
设置控制模式:位置控制模式6060设置为1,伺服处于配置文件位置控制模式
设置定位的地址:映射地址607A设置定位地址
设置定位的速度:映射地址6081设置定位运行速度
定位启动:映射地址6040设置为H7F时增量定位,H3F是设置为绝对定位
介绍:
主要讲解三菱MR-JE-C产品,在配置文件方式控制模式下,通过CC-LINK IE Field Basic通讯,实现伺服原点回归功能的基础知识和基本操作方法。可以独立使用三菱FX 5U PLC控制MR-JE-C伺服,进行最简单的伺服原点回归操作。
亮点:
1.FX5U通过CC-Link IE Field Basic通信功能,进行数据设置方式原点回归的设置内容和操作步骤。
2.FX5U通过CC-Link IE Field Basic通信功能,进行配置文件方式下速度控制和原点回归的操作和监视方法。
功能介绍:
原点回归是使定位指令装置的指令坐标与机械坐标一致的必须操作之一。在使用JE-C 时有2种方式实现定位控制的原点回归。
A 当使用脉冲控制伺服定位时,可以使用定位模块的原点回归功能实现原点回归。
B 使用内置定位或网络通讯控制定位时,使用伺服内置原点回归功能实现原点回归。
硬件配置:
进行原点回归条件要求:
A. 电机和机械安装完成
B. 正确完成接线
C. 正确设置PLC和伺服参数
D. 放大器和PLC间通讯建立
E. 全部正常无报警
原点回归的操作步骤:
1 伺服参数设置
主要检查、设置以下参数:
2 PLC侧参数设置
A 设置PLC IP地址和是否使用CC-Link IE Field Basic功能
B CC-Link IE Field Basic网络配置
C CC-Link IE Field Basic网络的刷新设置
3 PLC侧程序制作
建立连接:对应伺服的 Y3F对应软元件 B8F 置 ON

编写配置文件速度模式应用程序
编写原点回归控制模式程序:位置控制模式6060设置为6,伺服处于原点回归模式

编写原定回归操作启动程序

执行原点回归操作
参数、程序编制、写入完成后,进行断电、上电操作
GX Works3 软件与PLC连接并进入监视模式。
使用速度模式使电机旋转 1转以上
切换到原点回归模式
启动原点回归
观察是否确实完成原点回归
第二 : MR-JE-C伺服通过CC-Link IE Field Basic网络实现轨迹位置控制操作
从控制器给出目标位置(Target position) 、启动后电机运行。
因为不是使用逐次位置(fΔt)指令,所以无需通过控制器进行位置指令运算。
从控制器侧可以控制或监视每组最多16轴、共64轴的伺服放大器。
功能特点
该功能是通过MR-JE-C系列伺服采用CC-Link IE Field Basic网络实现位置控制,该网络不使用专用ASIC而只需安装软件来实现循环通信的标准Ethernet基础的协议,可以与TCP/IP通信并存,以构筑高自由度的系统。
通过简单有限几个映射地址,既可以完成位置控制的全部相关位置、速度等参数设定和启动,使用灵活方便
功能的用处
MR-JE-C采用CC-Link IE Field Basic网络实现伺服控制主要应用于系统响应性能要求不高、网络信息指令传输需求,有成本控制需求、还需精确定位的控制场合。
功能的使用方法
设置控制模式:位置控制模式6060设置为1,伺服处于配置文件位置控制模式
设置定位的地址:映射地址607A设置定位地址
设置定位的速度:映射地址6081设置定位运行速度
定位启动:映射地址6040设置为H7F时增量定位,H3F是设置为绝对定位



